








Семейство мини роботов, каждый со своим собственным поведением.
Описание
В данном проекте представлено семейство мини роботов на базе контроллеров ATtiny, вибрационных двигателей и фототранзисторов.
Подробная информация
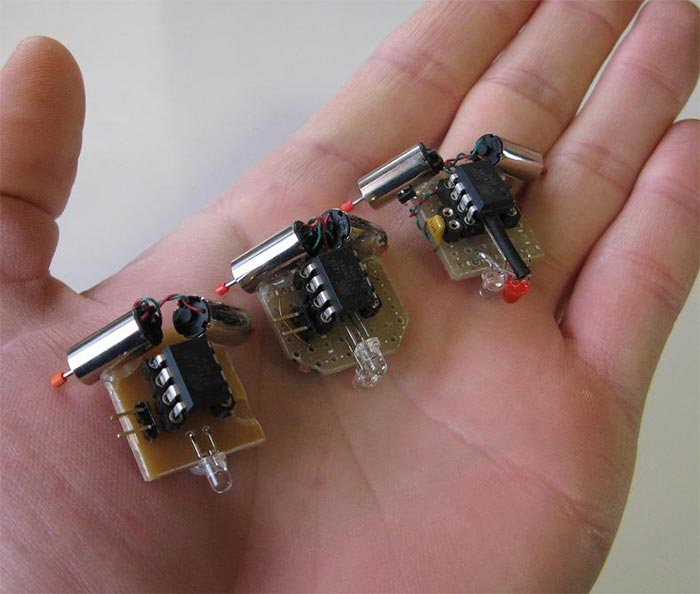
Эти три небольших автономных транспортных средства имеют множество аналогичных компонентов, таких как контроллер, батарея и механизм перемещения. Они все распознают окружающий мир с помощью глаз на базе фототранзисторов. Тем не менее, все они отличаются по своей конструкции, имеют различные возможности и характеристики. Они являются первыми представителями растущего семейства миниатюрных роботов, с которыми я долгое время провожу свои эксперименты.
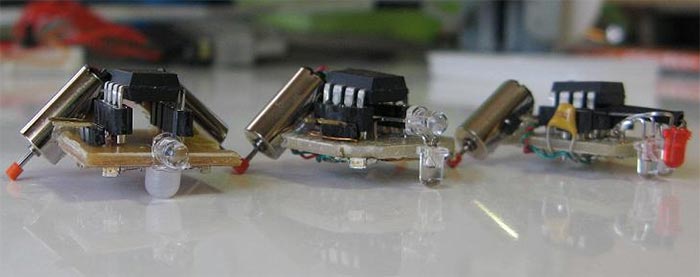
Ключевым аспектом их конструкции является, по крайней мере, один фототранзисторный глаз и один управляемый светоизлучающий диод. Эти компоненты позволяют мини роботам эффективно взаимодействовать с окружающей средой. В зависимости от того, как они запрограммированы, это может быть также сложно, как передача данных между роботами или также просто, как внешнее взаимодействие с другими роботами. Конечное взаимодействие будет зависеть от типа роботов. Например, глаза робота 1 направлены вниз, чтобы сканировать поверхность, в то время как робот 3 смотрит только прямо вперед.
На данном этапе я не программировал их на сложное взаимодействие. Их основные поведенческие характеристики заключались в следующем:
- Робот 1 – Имеет левый и правый глаз, которые направлены вниз. Они могут обнаруживать светлые участки на поверхности. Посмотрите видео его работы в качестве оператора линейного слежения.
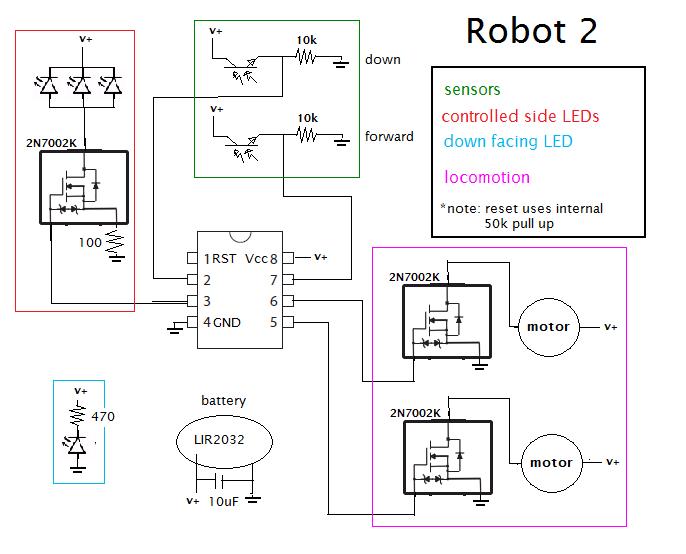
- Робот 2 – Имеет один глаз, направленный вниз, и один вперед. Глаза контролируют группу светодиодов по ее периметру. Они отслеживают светлые участки на поверхности и смотрят вперед. Робот также может посылать сигнал во всех направлениях с помощью светоизлучающих диодов.
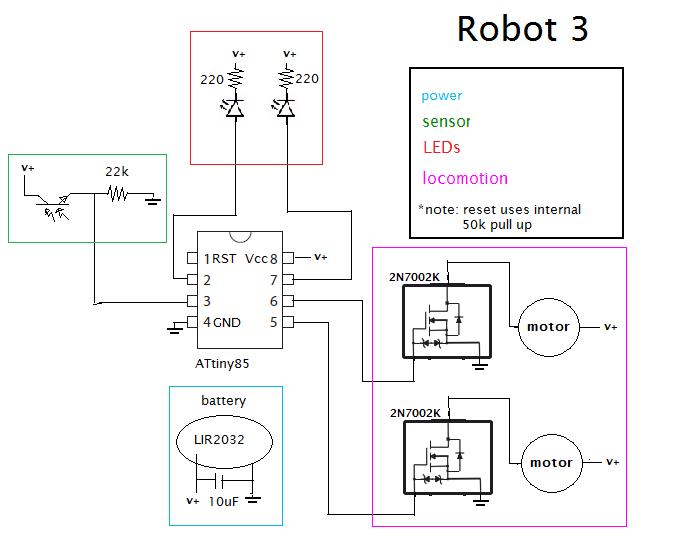
- Робот 3 – Имеет один глаз, направленный вперед, и два отдельно контролируемых светодиода, которые направлены под углом 45 градусов в каждую сторону. Предполагается, что этот робот может обнаруживать препятствия и определять направление, куда нужно повернуть, чтобы их преодолеть. Я пока еще продолжаю разрабатывать эту функцию.
Аппаратные средства:
В качества контроллера можно использовать любой 8-выводной ATtiny. Я использовал tiny85, поскольку он просто был в наличии. Я попробовал версию на базе ATtiny10, но впоследствии больше к ней не возвращался. В качестве батарей я использовал перезаряжаемые литиевые батареи монетного типа IR2032, которые я вытащил из брелока-фонарика на солнечной батарее. Хоть они и недолго работали между циклами заряда, однако я не планировал тратить много денег на приобретение новых батарей.
Вот как выглядит нижняя часть платы каждого робота.
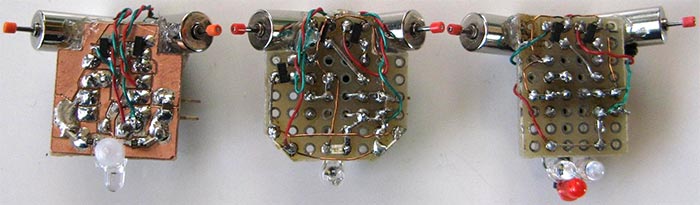
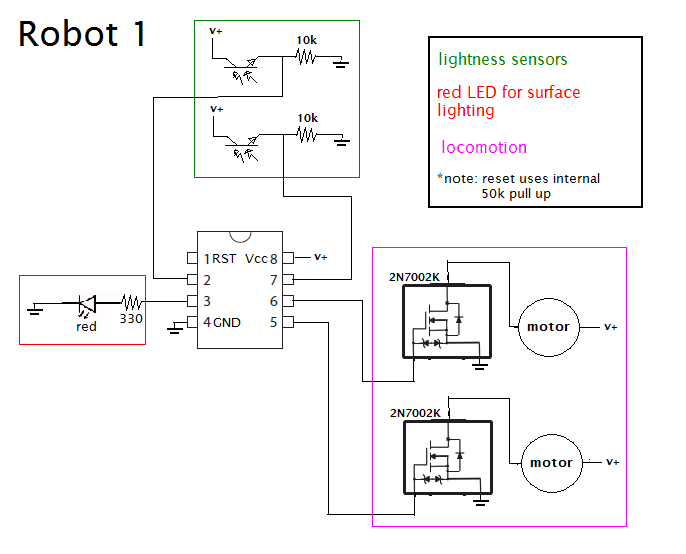
Здесь вы можете увидеть МОП-транзисторы 2N7002K, которые предназначены для управления двигателями. Также на платах установлены различные резисторы, конденсаторы и светодиоды. Схемы роботов указаны ниже:
Программное обеспечение:
На данном этапе используется очень простая программа. В ее код достаточно просто добавить еще один шаблон поведения, поскольку основной цикл просто вызывает функцию поведения. Робот 1 имеет поведение линейного слежения. Робот 2 сканирует поверхность и может отправлять сигнальные сообщения другим роботам, находящимся в данной зоне. Робот 3 избегает препятствия (все еще работаю над данной функцией). Я могу, конечно, загрузить текущий программный код для данного робота, если будет нужно, но в этот код постоянно вносятся изменения и он еще далек от завершения. Вот почему на этом этапе я пока не предоставил данный программный код.
Если я сделаю новых роботов, видео, коррекции и т.д., тогда, естественно, я предоставлю обновленную информацию об этом.
Перечень компонентов
- 1 × микроконтроллер ATtiny85
- 2 × МОП-транзисторы 2N7002K МОП с изолированным затвором
- 2 × небольших двигателя от андромеда роботов
- 1 × красный светоизлучающий диод
- 1 × фототранзистор ASDL-6620
- 1 × комплект различных резисторов и конденсаторов с поверхностным монтажом, которые изображены на схеме
- 1 × перезаряжаемая батарея LIR2032 3.6В
Ниже представлен код линейного слежения для робота 1 на Github.
- Robot1.ino – Arduino версия может использоваться непосредственно в Arduino
- Robot1.cpp – c++ версия, которая все еще использует Arduino библиотеки
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Робот 1. | |||||||
| МК AVR 8-бит | ATtiny85 | 1 | Поиск в магазине Отрон | ||||
| MOSFET-транзистор | 2N7002K | 2 | Поиск в магазине Отрон | ||||
| Фототранзистор | ASDL-6620 | 2 | Поиск в магазине Отрон | ||||
| Электролитический конденсатор | 10 мкФ | 1 | Поиск в магазине Отрон | ||||
| Резистор | 330 Ом | 1 | Поиск в магазине Отрон | ||||
| Резистор | 10 кОм | 2 | Поиск в магазине Отрон | ||||
| Светодиод | Красный | 1 | Поиск в магазине Отрон | ||||
| Двигатель | 2 | От роботов "Андромеда" | Поиск в магазине Отрон | ||||
| Перезаряжаемая батарея | LIR2032 3.6 В | 1 | Поиск в магазине Отрон | ||||
| Робот 2. | |||||||
| МК AVR 8-бит | ATtiny85 | 1 | Поиск в магазине Отрон | ||||
| MOSFET-транзистор | 2N7002K | 3 | Поиск в магазине Отрон | ||||
| Фототранзистор | ASLD-6620 | 2 | Поиск в магазине Отрон | ||||
| Электролитический конденсатор | 10 мкФ | 1 | Поиск в магазине Отрон | ||||
| Резистор | 100 Ом | 1 | Поиск в магазине Отрон | ||||
| Резистор | 470 Ом | 1 | Поиск в магазине Отрон | ||||
| Резистор | 10 кОм | 2 | Поиск в магазине Отрон | ||||
| Светодиод | Красный | 4 | Поиск в магазине Отрон | ||||
| Двигатель | 2 | От роботов "Андромеда" | Поиск в магазине Отрон | ||||
| Перезаряжаемая батарея | LIR2032 3.6 В | 1 | Поиск в магазине Отрон | ||||
| Робот 3. | |||||||
| МК AVR 8-бит | ATtiny85 | 1 | Поиск в магазине Отрон | ||||
| MOSFET-транзистор | 2N7002K | 2 | Поиск в магазине Отрон | ||||
| Фототранзистор | ASLD-6620 | 1 | Поиск в магазине Отрон | ||||
| Электролитический конденсатор | 10 мкФ | 1 | Поиск в магазине Отрон | ||||
| Резистор | 220 Ом | 2 | Поиск в магазине Отрон | ||||
| Резистор | 22 кОм | 1 | Поиск в магазине Отрон | ||||
| Светодиод | Красный | 2 | Поиск в магазине Отрон | ||||
| Двигатель | 2 | От роботов "Андромеда" | Поиск в магазине Отрон | ||||
| Перезаряжаемая батарея | LIR2032 3.6 В | 1 | Поиск в магазине Отрон | ||||
Скачать список элементов (PDF)
Прикрепленные файлы:
- TinyRobotFamily.zip (5 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (1) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация