








В этой статье речь пойдет об интереснейших роботах, принцип построения которых заключается в использовании простых аналоговых цепей. Мы рассмотрим их особенности и основные принципы, а в конце попробуем сделать простого робота.
Это просто даже для начинающих радиолюбителей!
Одобряется при создании робота использовать как можно меньшее число электронных элементов и можно даже пустить в ход электронные отходы.
Важнейшим принципом конструирования BEAM-робота является подражание природе живых существ.
BEAM робот должен обладать свойствами, присущими живым существам. Конечно же речь не идет о таких признаках как дыхание, рост, размножение, потому что роботу это и не нужно. Зато питание, движение и развитие для данных роботов являются главным смыслом жизни.
Движение является неотьемлимым признаком (свойством) любого живого существа. Это самое простое, что можно реализовать в BEAM роботе. В моем понимании движение бывает самопроизвольное или обдуманное (намеренное). По отношению к умным роботам можно сказать, что от них требуются только обдуманные движения. Например у человека невольно могут придти в движение мышцы лица для передачи мимики (например из-за внезапно возникшей эмоции), а для робота любое ненужное движение ведет к нерациональной трате энергии.
Сложной, но интересной задачей стоит создание искусственного интеллекта BEAM робота, ведь по философии BEAM роботостроения в них не используются микроконтроллеры и микропроцессоры, а все осуществляется на аналоговых дискретных компонентах. Использование микроконтроллеров не запрещается, но базовые инстинкты робота должны быть основаны на использовании множества поведенческих моделей, связанных напрямую с сенсорами и датчиками при минимальном уровне обработки сигналов.
Питание
В большинстве случаев элементом питания является батарейка. Но если вы хотите создать робота с автономным питанием, то нужно использовать энергию излучения (например солнечный свет). Устройство, преобразующее солнечную энергию в постоянный электрический ток называется солнечная батарея, состоящая из полупроводниковых фотоэлементов. Солнечные батареи дают небольшое количество электрической энергии в режиме реального времени, но только в присутствии солнца. Для того чтобы не "умереть" при отсутствии солнца, целесообразно использовать аккумуляторные элементы для сохранения накопленной энергии на "черный день"...ну или на пасмурный день.
Адаптация и поведение
Робот на аналоговых схемах больше приспособлен к окружающей среде по сравнению с цифровым роботом, эффективность которого заканчивается при попадании в ситуацию не прописанную в программе его цифрового мозга. Иными словами цифровые роботы не могут решать задачи, ответы на которые не заложены в их программе.
Концепция BEAM-роботов, предложенная Марком Тилденом, состояла в том, что реакция на внешние факторы должна обеспечиваться на первом этапе самой машиной, без участия какого-либо "мозга", как это происходило и в живой природе, на пути от простейших к человеку. По этому же пути должно идти совершенствование и создание более сложных робосистем.
Виды
Существуют разные виды роботов BEAM, которые созданы для выполнения разных задач.
Аудиотропы - реагируют на звуки.
Фототропы - реагируют на свет.
Радиотропы - реагируют на радиочастоты.
Термотропы - реагируют на тепловое излучение.
Наиболее часто встречаются фототропы, поскольку поиск света является наиболее очевидной задачей для использующего солнечную энергию робота.
Модульная структура
Лично мне нравится идея создания BEAM робота из отдельных функциональных модулей, и руководствуясь принципом "от простого к сложному" можно будет развивать робота, добавляя все новые и новые модули. Каждый модуль сам по себе может работать отдельно, т.е. не будет использоваться централизованный мозг для обработки информации.
Шасси
Для того, чтобы робот мог двигаться, нужно сконструировать для него шасси.
Оно бывает разных типов: гусеничное, на колесах и даже на ногах...
Давайте рассмотрим их подробнее.
1. Гусеничное.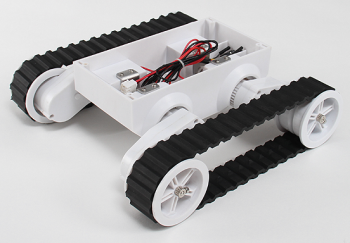

На рисунке представлено готовое шасси, которое не трудно найти в продаже. В большинстве случаев приходит в движение от пары мотор-редукторов.
Плюсы: хорошо поворачивает, не используя при этом рулевые механизмы; имеет повышенную проходимость; на него удобно монтировать электрические платы и отдельные компоненты.
Минусы: такое шасси трудно собрать дома самому, а стоимость составляет в среднем 90 долларов.
2. Шасси на колесах.
Плюсы: самый простой тип в отношении того, что его можно собрать дома самому (например из детского конструктора и пр.) или использовать игрушечную машинку.
Минусы: для осуществления поворота требуется рулевой поворотный механизм, а значит придется использовать дополнительный электродвигатель, что влечет за собой увеличение массы конструкции и повышение потребления электроэнергии.
3. Робот на ногах.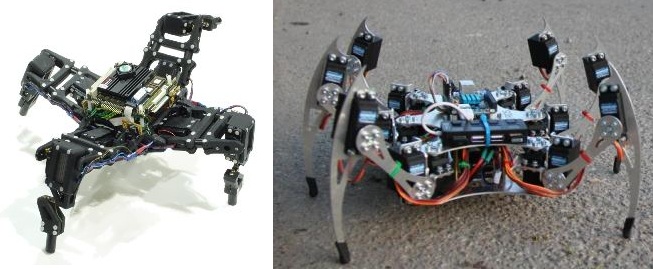
Это самый сложный тип.
Плюсы: их внешний вид приближен к живым существам, а движения выглядят более эффектно.
Минусы: используется большое количество механизмов, и очень часто такой робот нуждается в системе, обеспечивающей равновесие.
ДЕЛАЕМ САМИ!
Шасси для своего робота можете сделать так как показано на рисунке ниже.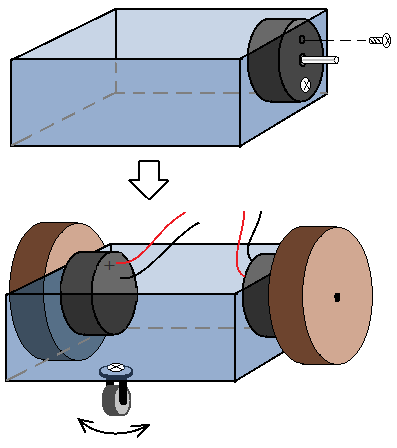
За основу можно взять коробочку. Лучше из пластмассы, потому что это легкий материал. В этой же коробке удобно разместить элемент питания: аккумулятор, батарейки и т.п.
Учитывайте, что чем больше колеса, тем медленнее будет ехать робот (а может и не сдвинуться с места).
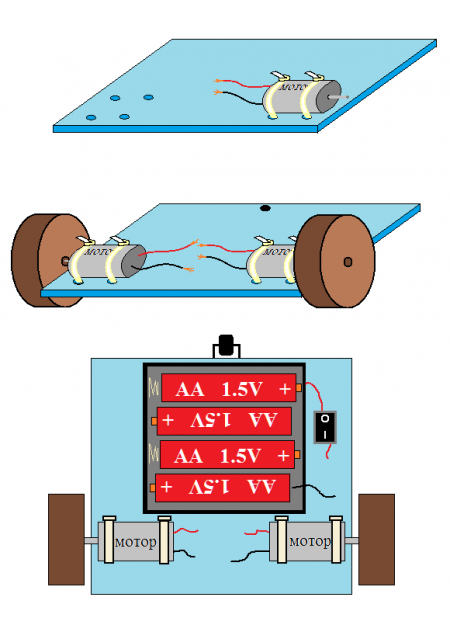
Второй вариант. Здесь использованы пластиковые хомутики для закрепления моторчиков.
Электромоторы можно взять со старой техники: магнитофоны, игрушки, дисководы и пр.
У меня дома имелись моторчики трех типов:

Выбор пал на верхний моторчик. Он показал хорошие характеристики по тяге и потреблению тока.
Также нам потребуется батарейный отсек, чтобы обеспечить питание. Питание можно организовать раздельное: для моторов (силовое) и для логической схемы.
Ниже представлена простая схема робота, который едет на свет фонарика.
Схема 1. "Идущий на свет".
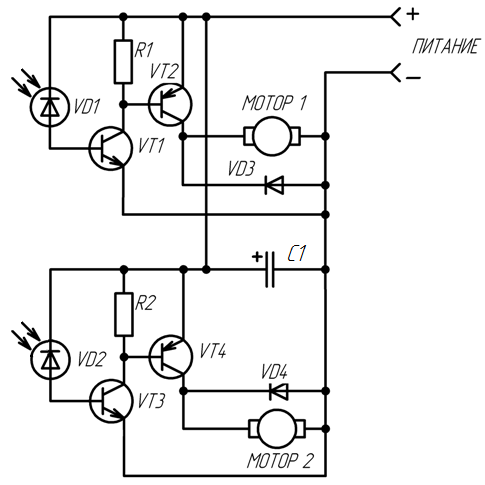
В этой схеме использованы фотодиоды. Их выбираем по диапазону чувствительности, т.е. учитывая на какой свет робот будет идти. К примеру на свет от фонарика (видимый диапазон) или на лучик пульта от телевизора (инфракрасный диапазон). Если осветить фотоэлемент VD1, то будет вращаться Мотор 1, а если осветить фотоэлемент VD2, то будет вращаться Мотор 2. Учитывая это, моторы расположим так, чтобы когда VD1 освещен Мотор 1 поворачивал робота к свету.
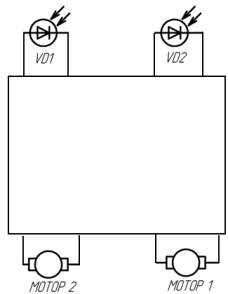
А если моторы поменять местами, то робот наоборот будет отворачиваться от света.
Теперь рассмотрим фотоэлементы.
В качестве элементов, чувствительных к свету используются фотодиоды, фототранзисторы, фоторезисторы и т.п. В интернете присутствует много информации по этим элементам, поэтому я опишу их вкратце.
1. Фоторезистор: в темноте он представляет собой высокоомный резистор, а при освещении светом его сопротивление падает пропорционально интенсивности света, проявляя линейную зависимость. Как правило воспринимают только видимый свет.
2. Фотодиод: полупроводниковый прибор, так же как и обычный диод имеет анод и катод.
Если применить прямое включение, то освещенный фотодиод будет вырабатывать напряжение на выводах.
При обратном включении сопротивление облученного фотодиода падает так же как у фоторезистора.
По диапазону света фотодиоды делятся на ИК-диоды и для видимого света. ИК-диоды воспринимают только инфракрасное излучение, но также хорошо реагируют на лампы накаливания и на Солнце.
3. Фототранзистор: отличается от обычного транзистора тем, что на область базы подается свет, который управляет усилением тока эмиттер-коллектор.
Без особого успеха в качестве светочувствительного элемента можно использовать светодиод. Он обладает слишком малой чувствительностью и усилить ее можно лишь с помощью дополнительной схемы.
BEAM-робот, который получился у меня
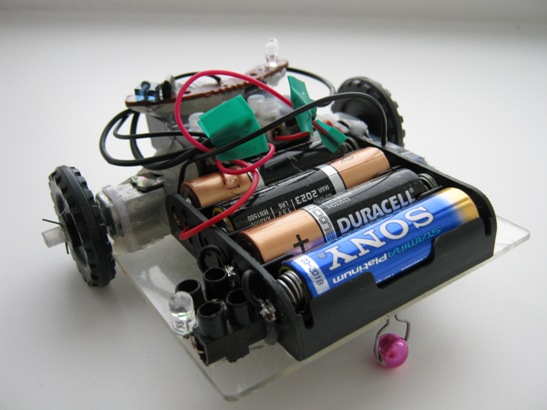
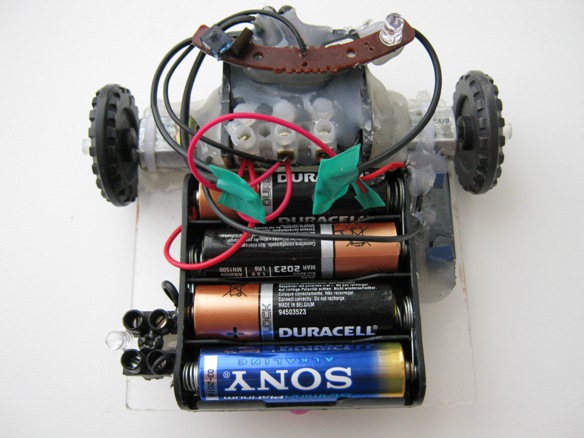
В своем роботе я использовал разные фотодиоды неизвестного происхождения. На видео видно, что чувствительность одного из них больше.
Один из фотодиодов реагирует на лучик пульта от телевизора.
Также вся "начинка" залита термоклеем.
Надеюсь у вас получится лучше и красивее!
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| VT1, VT3 | Биполярный транзистор | КТ3102 | 2 | КТ315 | Поиск в магазине Отрон | |
| VT2, VT4 | Биполярный транзистор | КТ361Б | 2 | КТ816 | Поиск в магазине Отрон | |
| VD1, VD2 | Фотодиод | С подходящей длиной волны | 2 | Поиск в магазине Отрон | ||
| VD3, VD4 | Диод | КД521Б | 2 | Поиск в магазине Отрон | ||
| С1 | Электролитический конденсатор | 100 мкФ | 1 | Поиск в магазине Отрон | ||
| R1, R2 | Резистор | 10 кОм | 2 | Поиск в магазине Отрон | ||
Скачать список элементов (PDF)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (1) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация