








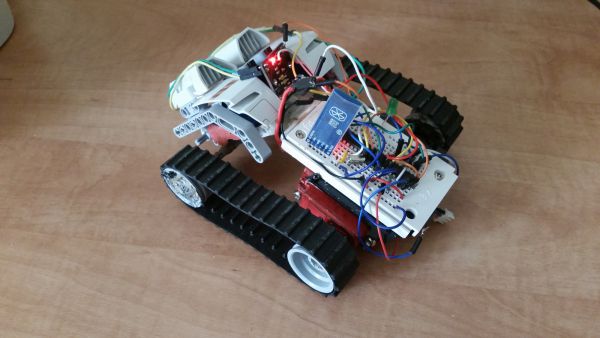
В этой статье речь пойдет о моём новом роботе, управляемом дистанционно. Он движется при помощи двух моторов, а вместо колёс - гусеницы. В принципе, робот неплохой, но пока он из себя ничего не представляет. В будущем можно будет приставить к нему пару датчиков расстояния, температуры, влажности и другие датчики, чтобы сделать, например, ездящую метеостанцию, которая будет передавать данные с датчиков по Bluetooth на телефон.
Перейдем непосредственно к сборке этого устройства...
СПИСОК РАДИОДЕТАЛЕЙ И КОМПЛЕКТУЮЩИХ:
Для этого нам понадобится крайне маленькое количество деталей:
- два мотора (Я выбрал сервоприводы постоянного вращения, знаю, что в интернет магазине дорого, поэтому купил обычные и переработал их в такие),
- набор гусениц и танковая звезда (http://dvrobot.ru/248/ все здесь),
- пластиковая(ое) платформа/основание,
- макетная плата,
- аккумулятор 7.4v,
- болты и гайки,
- пара рулевых устройств для сервоприводов (http://dvrobot.ru/240/103.html),
- Atmega328,
- l293d,
- кварцевый резонатор 16 МГц,
- кнопка для сброса (Reset),
- HC-06.
Инструменты:
- Паяльник.
- Отвертка.
- Пинцет и плоскогубцы.
Теория, необходимая для того, чтобы собрать робота, или наметки проекта:
Для запуска моторов нам понадобиться драйвер моторов. Вполне сойдет l293d, хотя у этой микросхемы сила тока на выходе всего лишь 1А., но для двух сервоприводов это подойдет. В этом драйвере 8 выводов. Из них 4 для ввода двух моторов, ещё 4 минус или GND, один для внешнего питания моторов, ещё один ля питания микросхемы, два вывода для перемены скорости, 4 вывода для изменения направления движения моторов. Atmega 328 при подключении к драйверу будет регулировать направление моторов и скорость их движения в зависимости от данных полученных с android устройства.И это пока всё.
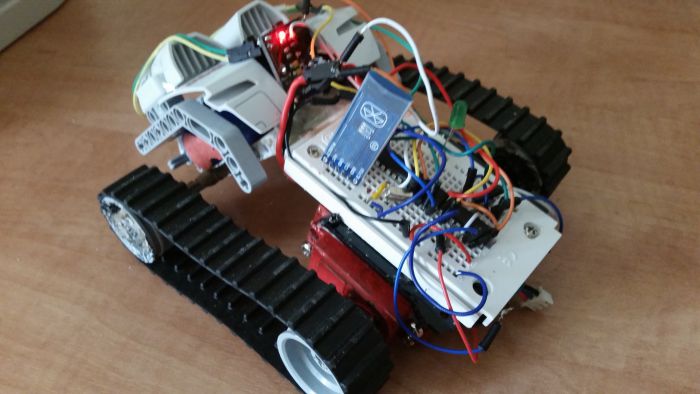
Корпус:
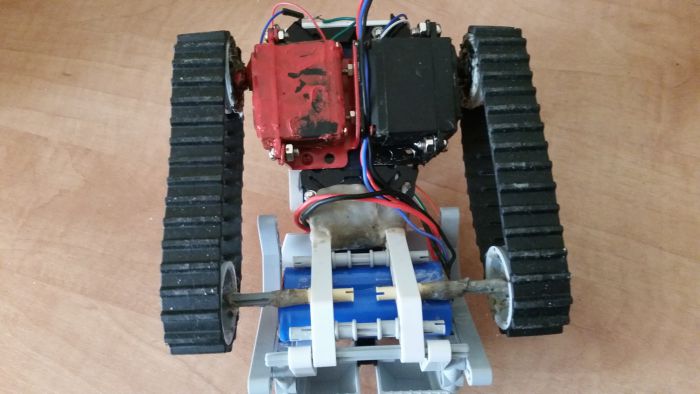
Я взял платформу из пластика, прикрутил к нему макетную плату, потом из лего деталей соорудил ножки для 2-ых колес, которым будет натягиваться гусеница. Затем так же из lego сделал отсек для аккумулятора, чтобы во время движения он не выпадал и держался ровно.
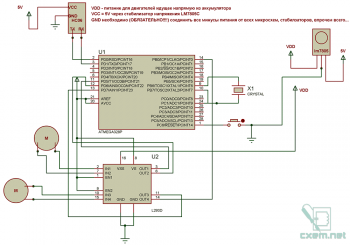
Схема:
Печатная плата:
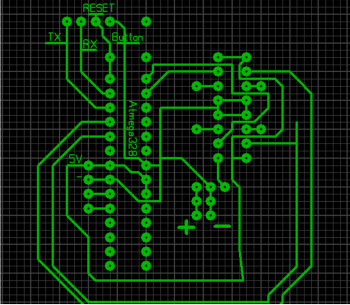
В центре сама Atmega328, правее драйвер моторов l293d, ниже три вывода для стабилизатора lm7805ct и два ввода питания +/-.
Подключение питания:

Я также использую плату питания.Если вы используете lm7805ct, то вам надо подключить все минусы всех устройств, затем плюс от аккумулятора к плюсу для питания моторов в драйвере l293d, а плюс от стабилизатора к макетной плате с микроконтроллером и Bluetooth модулем.
Программа:
Как прошивать программы в Arduino IDE, я описывал в моей предыдущей статье про мою первую разработку - RedBoard.
Программа или скетч состоит из нескольких функций, которые отвечают за алгоритм езды. Есть 4 функции: FORWARD(), BACK(), LEFT(), RIGHT(), И REVERSE(). Это с перевода вперед, назад, налево, вправо, и стоп. Для HC-06 мы не используем никаких библиотек, а только переменную incomingByte, которая показывает полученные данные. Далее в функции setup устанавливаются параметры работы микроконтроллера, а в функции loop прописаны условия, то есть при каких-то данных с программы android устройства и по ним запускает моторы. Программа из Google Play. Там несложный интерфейс...
Скачать код для Arduino, шаблон Sprint-Layout и файл плат в Proteus вы можете ниже.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| U1 | МК AVR 8-бит | ATmega328P | 1 | Поиск в магазине Отрон | ||
| U2 | Драйвер электродвигателей | L293 | 1 | Поиск в магазине Отрон | ||
| Линейный регулятор | LM7805 | 1 | Поиск в магазине Отрон | |||
| Х1 | Кварцевый резонатор | 1 | Поиск в магазине Отрон | |||
| Тактовая кнопка | 1 | Поиск в магазине Отрон | ||||
| М, М | Электродвигатель | 2 | Поиск в магазине Отрон | |||
| Модуль Bluetooth | НС06 | 1 | Поиск в магазине Отрон | |||
Скачать список элементов (PDF)
Прикрепленные файлы:
- car_uprav1.lay (20 Кб)
- TrackWalker.rar (13 Кб)
- car_uprav1.ino (2 Кб)

 Опубликована:
Опубликована:
 Изменена: 04.10.2015
Изменена: 04.10.2015


 Вознаградить
Вознаградить



Комментарии (1) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация