








Мощным средством для отладки и тестирования приложений на микроконтроллерной базе может выступать встроенный премо-передатчик USART. Этот узел реализован в модели ATtiny2313 и во всех без исключения моделях семейства ATmega. Основная задача USART – реализовать асинхронный обмен данными через интерфейс RS-232 или иные его аппаратные реализации (RS-485, RS-482 и т.). Обработку информации в этом случае можно переложить на компьютер.
Соединение производится с помощью COM-порта (COMunication port). В самом простом случае для этого потребуется 3-проводный минимальный нуль-модемный кабель. Один проводник будет выступать в качестве общего провода. Еще две линии TX, RX используются для передачи и приема данных. Для получения максимальной пропускной способности (до 115.2 кбит/с у RS-232) длина соединительного кабеля должна быть как можно меньше(≤2м).
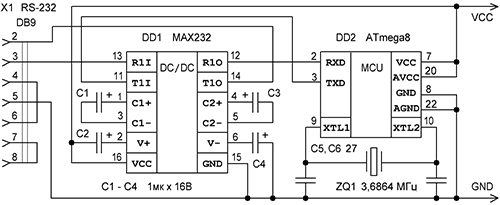
Рис.1 Схема соединения микроконтроллеров AVR с COM-портом
На рис.1 показан один из возможных вариантов соединения AVR с компьютером через COM-порт. Для согласования логических уровней ТТЛ с уровнями RS-232 (3…12В лог.1, -3…-12В лог.0) применяется преобразователь MAX232. При замене DD1 другими аналогами (ST232,AD232 и т.д.) могут понадобиться иные номиналы C1…C4 в пределах 0.1…1.0 мкФ. Две пары выводов 4,6 и 7,8 необходимо соединить между собой в корпусе разъема. Это поможет избежать многих проблем, если будет применяться аппаратное управление потоком.
Интерфейс RS-232 появился еще на заре компьютерной техники (введен в 1969г.). В дальнейшем, претерпев множество изменений, за пару десятков лет он стал одним из промышленных стандартов. Однако бурное развитие электроники, уже в середине 90-х годов, выявило несоответствие RS-232 требованиям своего времени. Коренные недостатки, которые изначально были заложены в его основе, предопределили судьбу интерфейса. В 1996 г., благодаря совместным усилиями ряда передовых компаний в области компьютерных технологий, увидел свет новый стандарт USB (Universal Serial Bus). На данный момент USB почти полностью вытеснил RS-232 из тех областей, где он использовался как вид компьютерной связи. Сейчас уже очень трудно найти новую материнскую плату, где имеется хотя бы один разъем COM-порта. Тем не менее, существует ряд специализированных микросхем, позволяющих эмулировать работу RS-232 через USB-интерфейс. К ним относятся, например, такие популярные преобразователи, как FT232BM, CP2102 и др. Для их взаимодействия c операционной системой загружается функциональный драйвер, который формирует виртуальный COM-порт и предоставляет широкие возможности для программирования как через функции драйвера (находятся в прилагаемых dll-библиотеках), так и с помощью традиционных файловых API-функций. В последнем случае работа с портом ведется как с обыкновенным именованным каналом. При этом благодаря использованию HS-режима (High Speed) USB режима появляется возможность работать на скоростях вплоть до 460.8 кбит/с. Обсуждение подробностей работы c COM-порта выходит за рамки темы данной книги. Но если в этом все-таки есть необходимость, то исчерпывающее описание всех нюансов связанных с программированием COM-порта можно найти в [ссылка].
Ниже приведена небольшая подпрограмма breack_point, реализующая точку останова. В том месте программы, где встречается ее вызов, происходит вывод данных на компьютер и остановка до тех пор, пока дальнейшая работа не будет разрешена. Считыванию подлежит содержимое пространства РОН, РВВ, SRAM и EEPROM. Каждой точки останова можно задать свой адрес в диапазоне 0…255. Подпрограмма имеет размер в 127 слов и потребует для своего выполнения 1 регистр для передачи адреса точки останова и 16 б стека.
; Для обмена данными подпрограмма использует модуль USART и
; перед началом работы необходимо произвести его инициализацию.
; Тактовая частота подается на модуль от системного генератора
; через предделитель, коэффициент деления которого задается
; парой управляющих регистров UBRRH:UBRRL(0…4095). Скорость
; приема-передатчика в асинхронном режиме (baud rate)
; определится, как BAUD = Fclk/(16(UBRRH:UBRRL-1)) (Fclk – частота
; генератора в Гц). Если при этом установить бит U2X в регистре
; UCSRA, то величина BAUD снизится в 2 раза. Скорость обмена
; должна быть близка к одному из стандартных значений,
; поддерживаемых функциональным драйвером контроллера COM-порта
; компьютера (110,300,600,1200,…,57600,11520 бит/с). Если
; погрешность ≤ 2.0% еще более-менее приемлема, то расхождение
; частот в пределах 4…5% уже критично для работы интерфейса, тем ; боле на больших скоростях. Поэтому самым лучшим способом
; добиться надежной связи посредством RS-232 и любым другим
; видом асинхронной передачи данных, - это использовать частоту ; стабильную кварцем. Для этих целей существует ряд специальных ; опорных частот резонаторов таких, как 1.8432, 3.6864, 11.0592 ; МГц и т.д. Все они дают нулевую погрешность для большинства
; используемых на практике скоростей обмена.
.equ XTAL = 3686 ;частота генератора в кГц
.equ BAUD = 115200 ;необходимая скорость обмена в бит/с
.equ NB = ((10000*XTAL)/(16*BAUD)-5)/10
.def temp = R16
.def numb = R27
ldi temp,high(RAMEND) ;инициализация стека
out SPH,temp
ldi temp,low(RAMEND)
out SPL,temp
.
ldi temp,high(NB)
out UBRRH,temp
ldi temp,low(NB)
out UBRRL,temp
; Настройки остальных режимов работы производятся через управляющие
; регистры: UCSRA,UCSRB,UCSRC. При этом регистр UCSRC имеет тот же
; адрес, что и UBRRH. Выбор регистра осуществляется с помощью бита
; URSEL(7-мой бит в этих регистрах). Если он установлен, то запись
; производится в URSEL; в противном случае в UBRRH. Для активизации
; линий приемника RXD и передатчика TXD должны быть установлены биты
; RXEN и TXEN в UCSRB. Там же находятся биты разрешения прерываний
; от модуля USART. Существует целых 3 условия по которым они могут
; быть сгенерированы и ,соответственно, 3 адреса в таблице векторов.
; Установка RXCIE приведет к прерыванию по завершению приема, TXCIE
; (используется редко) к прерыванию по завершению передачи, а
; установка UDRIE к прерыванию по опустошению регистра данных UDR.
; Флаги прерываний RXD,TXD,UDRE находятся в регистре UCSRA (там же
; Флаги различных ошибок работы приемо-передатчика). Размер слова
; данных задается битами UCSZ2:UCSZ0 (биты UCSZ1, UCSZ0 в UCSRC бит
; UCSZ2 в UCSRB) и составляет 5…8 разрядов (для 8-разрядных посылок
; UCSZ2:UCSZ0 = 011). Количество стоп-битов передатчика может быть 1
; или 2 в зависимости от состояния бита USBS в UCSRC. Для повышения
; достоверности данных можно использовать так же аппаратный контроль
; четности(задается битами UPM1:UPM0 из UCSRC).
ldi temp,(1<< RXEN)|(1<< TXEN)
out UCSRB,temp
ldi temp,(1<< URSEL)|(1<< UCSZ0)|(1<< UCSZ1)
out UCSRC,temp
.
ldi numb,1 ;программная точка останова 1
rcall breack_point
.
ldi numb,2 ;программная точка останова 2
rcall breack_point
.
; Подпрограмма для реализации точки останова
; R27 – регистры для передачи номера точки останова (0…255)
; В стеке используется 16 б для сохранения контекста
breack_point:
push R31 ;сохраняем в стеке регистры
push R30 ;R31,R30,R29,R28,R27,SREG
push R29
push R28
push R27
in R28,SREG
cli
push R28
rcall putc ;передаем номер точки останова (0…255)
ldi R27,low(SRAM_START-0x20)
rcall putc
ldi R27,high(SRAM_START-0x20)
rcall putc ;передаем количество РВВ (64…480)
ldi R27,low(SRAM_SIZE)
rcall putc
ldi R27,high(SRAM_SIZE)
rcall putc ;передаем размер SRAM (64…8192)
ldi R27,low(EEPROMEND+1)
rcall putc
ldi R27,high(EEPROMEND+1)
rcall putc ;передаем размер EEPROM (64…4096)
rcall read_REGISTER ;передаем содержимое РОН
rcall read_IO ;передаем содержимое РВВ
rcall read_SRAM ;передаем содержимое SRAM
rcall read_EEPROM ;передаем содержимое EEPROM
bp1: sbis UCSRA,RXC ;ожидаем пока не будет получен байт
rjmp bp1 ;данных с компьютера
in R27,UDR
cpi R27,'S' ;если принятый символ 'S', то окончание
breq bp2 ;фазы ожидания и выход из подпрограммы
cpi R27,'R' ;если принятый символ 'R', то переход
brne bp1 ;на нулевой адрес
rjmp 0
bp2: pop R28 ;восстанавливаем из стека регистры
out SREG,R28 ;SREG,R27,R28,R29,R30,R31
pop R27
pop R28
pop R29
pop R30
pop R31
ret
read_REGISTER:
clr ZH ;подпрограмма передачи РОН
clr ZL ;регистры R27…R31 считываются из стека
rr1: ld R27,Z+
rcall putc
cpi ZL,27
brne rr1
in ZH,SPH
in ZL,SPL
adiw ZH:ZL,4
ldi YL,5
rr2: ld R27,Z+
rcall putc
dec YL
brne rr2
ret
read_IO:
clr ZH ;подпрограмма передачи РВВ
ldi ZL,0x20 ;содержимое SP считывается из стека
ldi YH,high(SRAM_START-0x20)
ldi YL,low(SRAM_START-0x20)
ri1: cpi ZL,0x5D
brne ri2
push ZH
push ZL
in ZH,SPH
in ZL,SPL
adiw ZH:ZL,12
mov R27,ZL
rcall putc
mov R27,ZH
rcall putc
sbiw ZH:ZL,7
ld R27,Z
sbiw YH:YL,2
pop ZL
pop ZH
adiw ZH:ZL,3
rjmp ri3
ri2: ld R27,Z+
ri3: rcall putc
sbiw YH:YL,1
brne ri1
ret
read_SRAM:
ldi ZH,high(SRAM_START) ;подпрограмма передачи SRAM
ldi ZL,low(SRAM_START)
ldi YH,high(SRAM_SIZE)
ldi YL,low(SRAM_SIZE)
rs1: ld R27,Z+
rcall putc
sbiw YH:YL,1
brne rs1
ret
read_EEPROM:
in R27,EEARH ;подпрограмма передачи EEPROM
push R27 ;содержимое регистров, управляющих
in R27,EEARL ;EEPROM-памятью (EEARH,EEARL,EEDR,EECR)
push R27 ;предварительно сохраняется в стеке
in R27,EEDR
push R27
in R27,EECR
push R27
clr ZH
clr ZL
ldi YH,high(EEPROMEND+1)
ldi YL,low(EEPROMEND+1)
re1: sbic EECR,EEWE
rjmp re1
out EEARH,ZH
out EEARL,ZL
sbi EECR,EERE
in R27,EEDR
adiw ZH:ZL,1
rcall putc
sbiw YH:YL,1
brne re1
pop R27
out EECR,R27
pop R27
out EEDR,R27
pop R27
out EEARL,R27
pop R27
out EEARH,R27
ret
putc: sbis UCSRA,UDRE ;подпрограмма передачи
rjmp putc ;байта данных в компьютер
out UDR,R27
ret
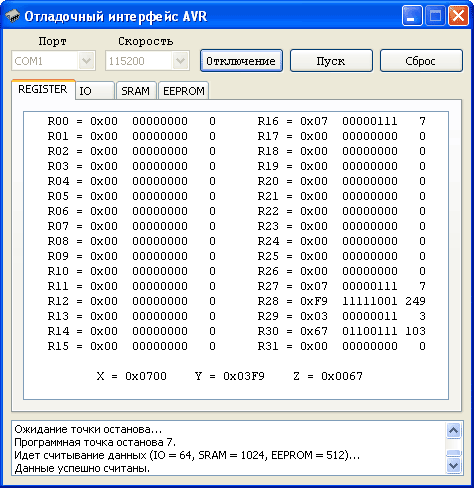
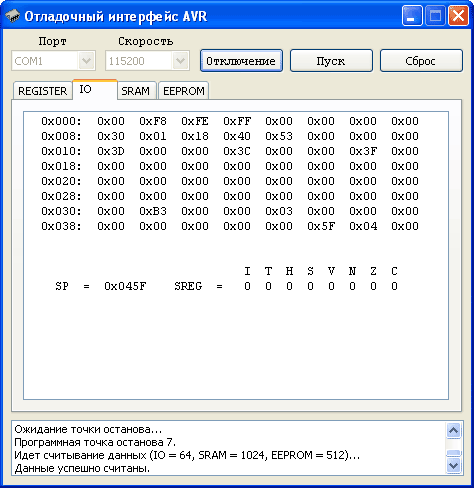
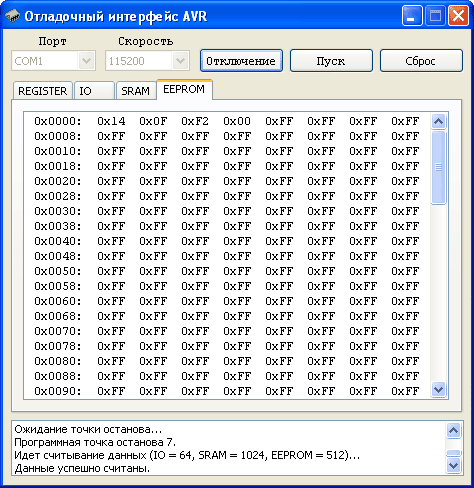
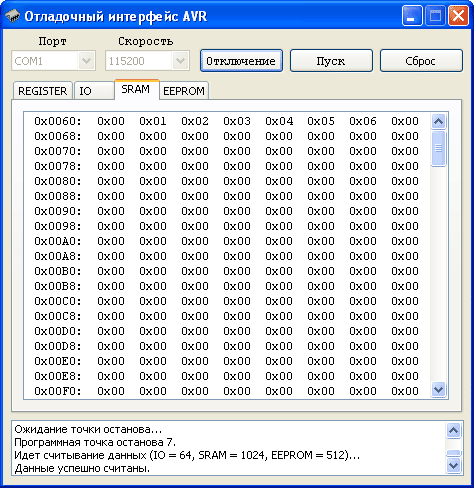
Внешний вид окна отладочной программы высокого уровня (файл DebbugInterface.exe) показан на рис.2. Для начала ее работы надо выбрать номер порта, скорость обмена и нажать на экранную кнопку “Соединение”. Если порт откроется успешно, то программа перейдет в состояние ожидания момента передачи данных, а после их получения в окнах можно будет просмотреть состояние соответствующих видов памяти AVR. После нажатия кнопки “Пуск” программа возобновит свое выполнение до следующей точки останова. Кнопка “Сброс” приводит к принудительному переходу на нулевой адрес памяти программ. Контроль четности или другие способы проверки достоверности данных не применяются. Формат данных 8-N-1 (8-разрядное слово данных, отсутствие контроля четности, 1 стоп-бит).
Перейти к следующей части: Операционные системы реального времени - Принцип действия ОСРВ
 Котов Игорь Юрьевич
Котов Игорь Юрьевич
 Опубликована: 2012 г.
Опубликована: 2012 г.


 Вознаградить
Вознаградить



Комментарии (1) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация