








Робот для подбора и перемещения предметов, управляя на расстоянии при помощи любого ИК пульта.
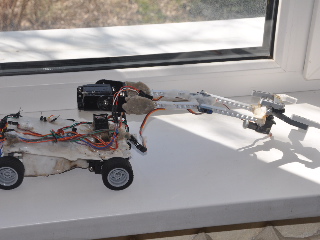
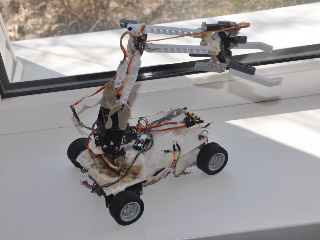
Вот уже почти год, как я занимаюсь робототехникой и электроникой. Вначале были простенькие робо-пауки на микросхемах, затем РУ модели машинок, обычные устройства для измерений состояний внешней среды. И вот, наконец, решил построить что –то намного серьёзнее и интереснее – робо-платформу, с радиоуправляемой рукой на ней! Но, как всем известно каждому роботу необходим отличный, высокопроизводительный процессор, из всех доступных вариантов самым подходящим является Микроконтроллер(PIC, Atmel и др.).
Сначала, я хотел приобрести ARDUINO в качестве микропроцессорного устройства, а также сенсоры и датчики DFROBOT. Но затем посчитав во сколько мне всё это с доставкой обойдётся – понял, что микроконтроллер лучше всего собрать самому, и всё это мне будет намного дешевле. Для выполнения этой задачи вполне сойдет микроконтроллер ATmega328P PU.
Прежде всего, для начала воссоздания именно такого робота необходимы будут:
1 - контроллер логики (ATmega328P PU);
2 - контроллер или драйвер двигателей платформы (l293 d или b, без разницы, обе подойдут);
3 - корпус для платформы и, соответственно, руки;
4 - остальные детали (пульт любой и двигатели).
Из выше перечисленного можно создать некоторую таблицу:
| № | Наименование деталей | Примечания |
|---|---|---|
| 1. | ATmega328 | Можно и другие микроконтроллеры, но я выбрал эту из-за её кол-во пинов и размер флеш памяти |
| 2. | L293B | Выбирайте лучше эту микросхему, так как на выход двигателям подается сила тока, равная 1А на каждую. |
|
3. |
Двигатели | Два для платформы, 4-е для манипулятора. |
| 4. | Пластик(поликапролактон) | Очень удобный для выполнения различных деталей |
| 5. | Провода | ПаПа и МаМа |
| 6. | Макетные платы | Для удобного прототипирования |
| 7. | Детальки из Lego | Как же без них |
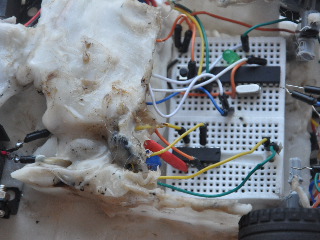
1.Контроллер (основной модуль).
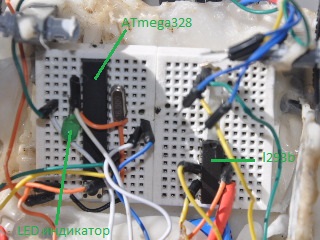
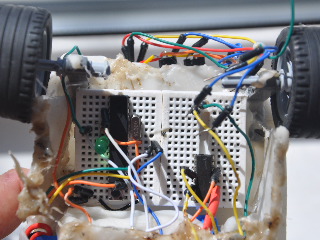
На основной плате находится сам микроконтроллер и драйвер, будут добавлены стабилизатор напряжения для сервоприводов и все соединения. Верхней части платформы будут расположены разъёмы для подключения по проводам ISP программатора. Для подключения питания остальных модулей, на плате имеется пара проводов подключаемых к разьему батарейки крона (+ -).
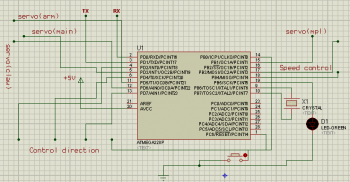
Принципиальная схема всех подключений:
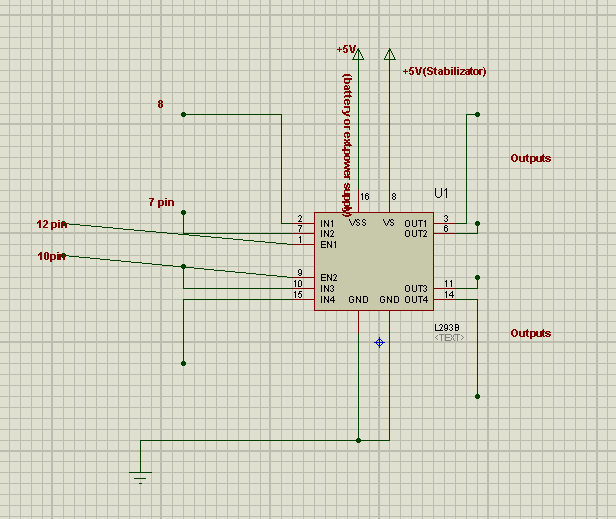
2.Драйвер двигателей.
Драйвер является посредником между электродвигателем и контроллером. Устройство выполнено на микросхеме l297B, что обеспечивает возможность использовать двигатели с током до 1 ампер, в случае использования драйвера на всю мощность, на стабилизатор напряжения необходимо установить радиатор.
Таблица: Управление двигателями.
|
||||||||||||||||||||||||||||||||||||
Принципиальная схема всех подключений:
3. ISP программатор.
В качестве программатора я использовал старую плату ARDUINO, но перед процедурой прошивки я вынул из платы микроконтроллер (для тех, кто не знает ОБЯЗАТЕЛЬНО).
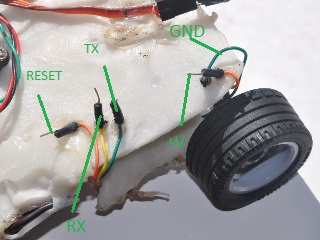
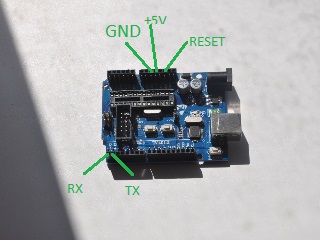
Для программирования необходимо присоединить все провода согласно надписям(на фото) и использовать Arduino IDE.
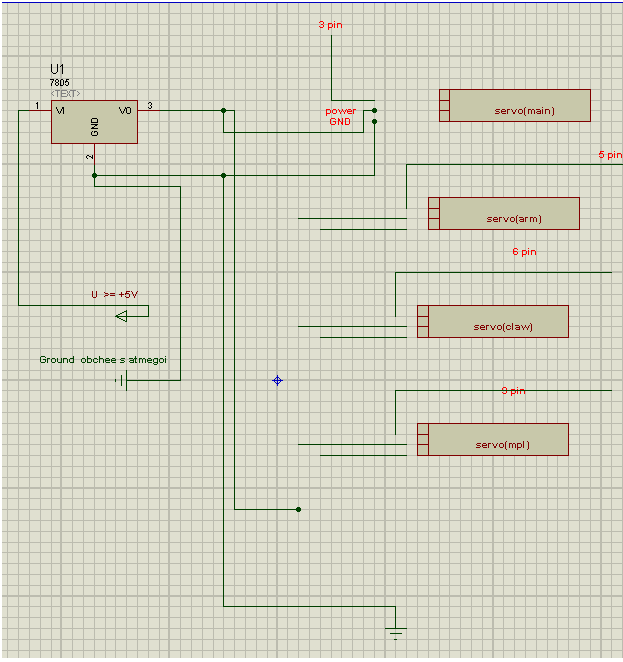
3. Стабилизатор напряжения (LM7805CT).
К стабилизатору можно подключать хорошие аккумуляторы выше 5 вольт, но самое главное чтобы ток был не меньше, чем 1000мА,
Если ток и напряжение аккумулятора будут выше то к стабилитрону лучше всего будет прикрепить радиатор.
4. Собираем корпус. Аппаратная часть.
Необходимые материалы:
Аккумулятор (я использовал 1500 мА, 7.4V)
два двигателя для платформы (я использовал две сервы пост. вращения)
4 любых сервопривода(для руки)
500г. поликапролактона
несколько деталек Lego для клешни
4-е колеса(тоже из Lego).
1) Сначала, нужно начать с изготовления основы. С задней стороны платформы можно расположить провода с сервоприводов.
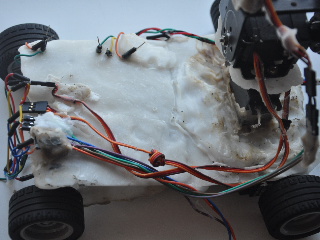
Расплавьте полиморф и раскатайте по стеклянной или металлической пластине, затем необходимы вырезать основу прямоугольной формы.Раскатывать желательно ровно и , пожалуй, можно воспользоваться скалкой. Мой пластик получился немного грязным , это потому что я его много использовал и к тому же плавил его паяльником в маленьких областях, чтобы быстро можно было заделать неудавшиеся участки.
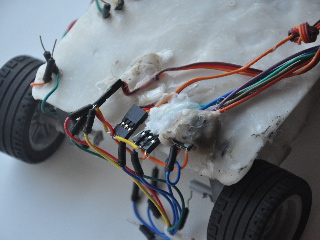
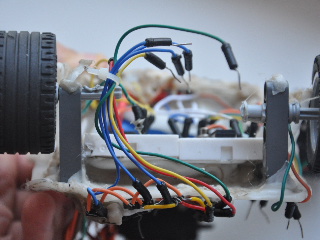
2) Макетную плату с контроллером стоит разместить в задней стороне основы, прикрепив все пластиком и припаяв:
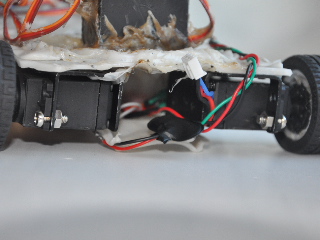
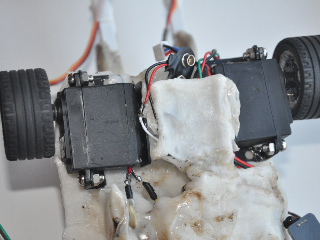
3) Двигатели для платформы стоит установить спереди и оставить место для батарейки кроны, питающей контроллер.
У меня моторы для основы являются сервоприодами постоянного вращения, а двигатели манипулятора:
2 х Сервоприводы на 6 кг\см
2 х Сервоприводы на 2 кг\см
Кабель, с синим, красным, черным проводами, выходит из аккумулятора для его подзарядки.
4) Колёса передних двигателей устанавливаются на их валы, а задних на детальки Lego Г-образные:
5) Основа внешне закрывается оставшимся пластиком.
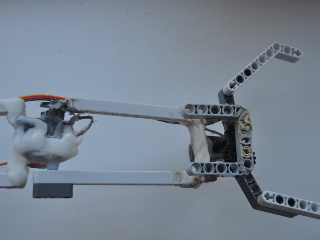
6) Манипулятор делается в основном из Lego, но первые две сервы прикрепляются при помощи двух кронштейнов:

Основание манипулятора прикрепляется к остальной руке с помощью пластика,
Из деталек Lego, вы сами сможете собрать руку, может быть, ещё лучше, чем у меня.
Впрочем, делать руку можно хоть из чего угодно.
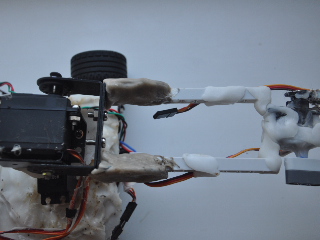
И, наконец, клешня делается при помощи микросервы и шестеренок.
5. Пишем программу. Программная часть.
Программа не сложная, включает в себя всего лишь две библиотеки, с комментариями.
В будущем программа будет упрощаться. Вообщем, с помощью этой программы можно будет управлять платформой и рукой дистанционно. При помощи кнопок можно будет изменять положение сервоприводов:
1) кнопки 5, 0 - схватить, разжать,
2) кнопки 2, 8 - опускать, поднимать всю руку,
3) кнопки 4, 6 - поворачивать влево, вправо весь манипулятор,
4) одна кнопка FUNC/STOP - отправка в исходное положение,
5) кнопка питания - включение серв,
6) кнопка паузы - отключение серв,
7) VOL+ и VOL- - вперед, назад,
8) перемотка - влево вправо,
9) стрелка вниз и вверх - изменение положения локтя манипулятора.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| МК AVR 8-бит | ATmega328P | 1 | Поиск в магазине Отрон | |||
| Драйвер электродвигателей | L293B | 1 | Поиск в магазине Отрон | |||
| Линейный регулятор | LM7805CT | 1 | Поиск в магазине Отрон | |||
| Резонатор | 16 МГц | 1 | Поиск в магазине Отрон | |||
| ИК приёмник | 38 кГц | 1 | Поиск в магазине Отрон | |||
| Резистор | 680 Ом | 1 | Поиск в магазине Отрон | |||
| Светодиод | Зеленый | 1 | Поиск в магазине Отрон | |||
| Двигатель | Платформенный | 2 | Поиск в магазине Отрон | |||
| Серводвигатель | Для руки | 4 | Поиск в магазине Отрон | |||
Скачать список элементов (PDF)
Прикрепленные файлы:
- MOTOR_ROBOT.ino (7 Кб)
- ProteusCXEMES.rar (30 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (3) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]