








Рис.1 Энкодер серии TK561
Энкодеры этого типа используются в частности для контроля скорости транспортеров производственных линий. Считываемые с энкодера данные по витой паре, подключенной к разъему энкодера, подаются на удаленный интерфейс для дальнейшей обработки компьютером АРМ. Это единственное, что мне и тому, кто прочтет эту статью, необходимо знать об участии энкодера в производственном процессе. Замена такого энкодера в случае поломки на новый, достаточно дорогое удовольствие, да и продаются они не в любом российском магазине. Поэтому, когда мне принесли в ремонт 2 почти одинаковых энкодера (рис.1) с заявлением - "не работают, но нужны еще вчера", я не был уверен, что их удастся достаточно быстро отремонтировать, т.к. при взгляде на начинку устройств, я увидел незнакомые для меня названия микросхем - MM88C30. Таких в моем распоряжении просто не было. Однако, необходима диагностика - в первую очередь.
"Прозвонив" разъемы энкодера по отношению к плате и отыскав сети файлы спецификаций на незнакомые микросхемы, набросал фрагмент схемы с внешними подключениями для обоих энкодеров. Схемы включения для MM88C30 в каждом из энкодеров и для каждой из двух используемых в каждом из устройств несколько отличались.
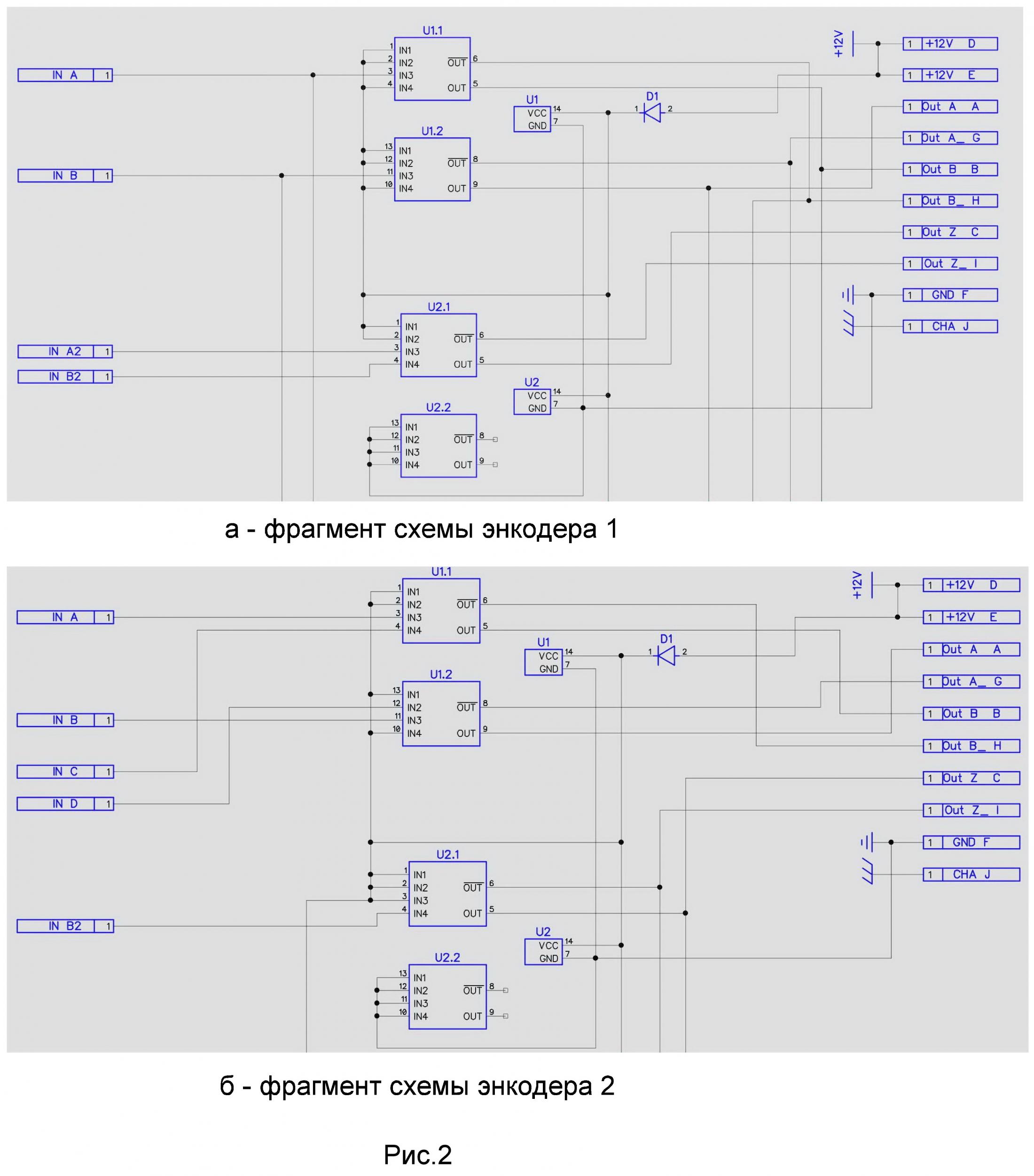
На рис.2 приведен фрагменты схем обоих энкодеров. Подключая поочередно питание (+12В) к соответствующим штифтам разъемов энкодеров, проверил наличие и качество импульсов на "интерфейсных" штифтах разъема, вращая вал энкодера. Предположение о неисправности MM88C30 (т.к. именно их выходы были нагружены на протяженную линию), - подтвердилось. Как в первом, так и во втором энкодере были неисправны микросхемы U1, на выходах которых импульсы отслеживались в половину амплитуды питающего напряжения и были искажены протяженными спадами. На выходах исправных микросхем импульсы представляли четкие "прямоугольники" с амплитудой напряжения питания.
Основной проблемой срочного ремонта стала замена микросхем на новые, ближайшее обитание которых было в магазинах весьма удаленных и срок доставки обещал быть долгим. Просмотрев параметры микросхем (напряжение питания - 3-15В; выходной максимальный ток - 50мА; входные логические уровни соответствуют логическим микросхемам КМОП-структуры; время задержки - до 350нС), проанализировал на предмет "похожести" параметров все то, что имелось в моем распоряжении, поймав себя на мысли о том, что внутренняя схема MM88C30 напоминает построение схем полумостовых драйверов для управления полевыми транзисторами. Сходство не обмануло. Действительно, если сравнить схемы MM88C30 (1/2 часть) и IR2111 (IR2104, IR2184), то можно увидеть, что построение схем в структуре от входа до выходов практически одинаково. Один вход (без учета наличия в MM88C30 4И-входа) и два противофазных выхода (для IR2111, например, инверсным будет выход "нижнего плеча" - LO, прямым - "верхнего плеча" - HO). На рис.3 приведены схемы из спецификаций MM88C30 и IR2111.
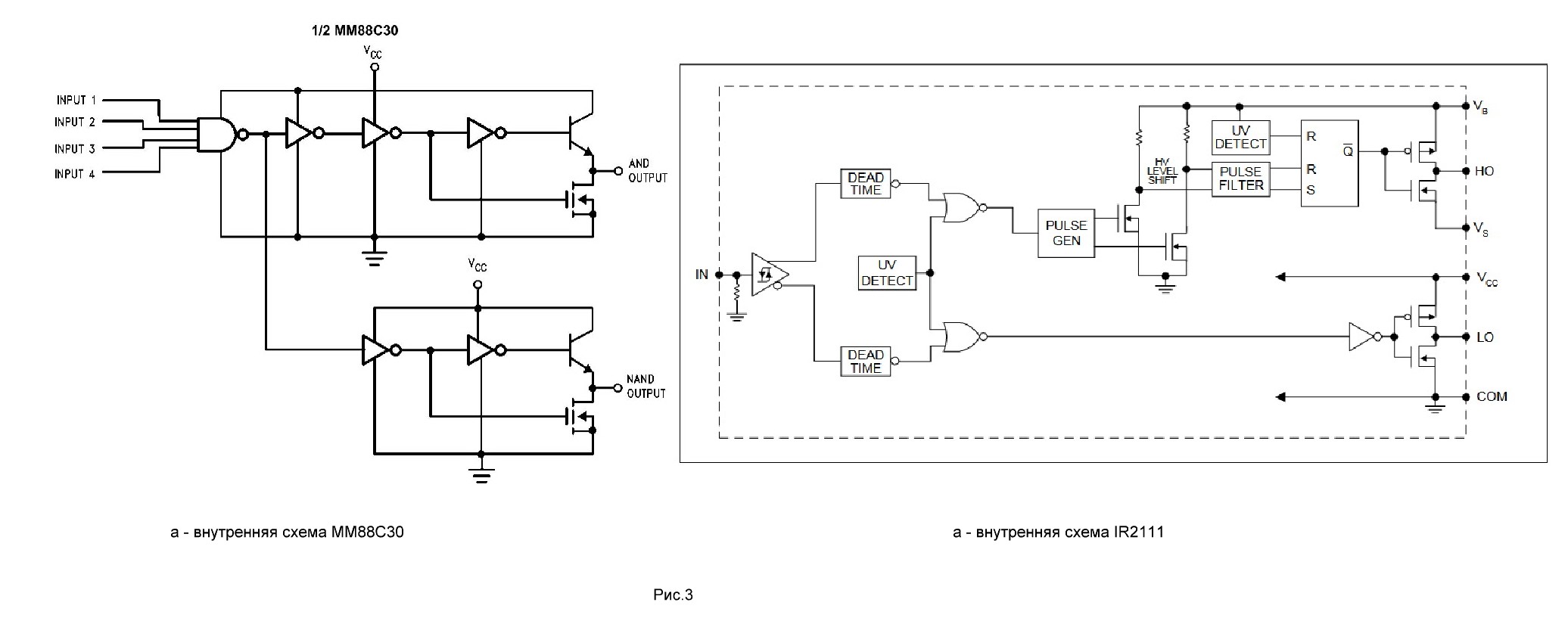
Электрические параметры IR2111 оказались не хуже: до +20В - напряжение питания, до 200мА ток положительного импульса. Управление по входу так же осуществляется логическим сигналом от ТТЛ- до КМОП-уровней. Выходной сигнал совместим с логикой КМОП-уровня и как бонус - высокая нагрузочная способность, что при работе на протяженную линию совсем не плохо. Что касается параметров времени задержки и переключения, посчитал, что этих параметров при не очень быстром вращении (используются локально до 200об/м) вполне достаточно. На сайте производителей спецификация гласит, что максимальное количество оборотов в минуту не может превышать 2000, а максимальная частота выходных импульсов при этом не превышает 300кГц. Понятно, что при 200об/м, частота не превысит 30кГц.
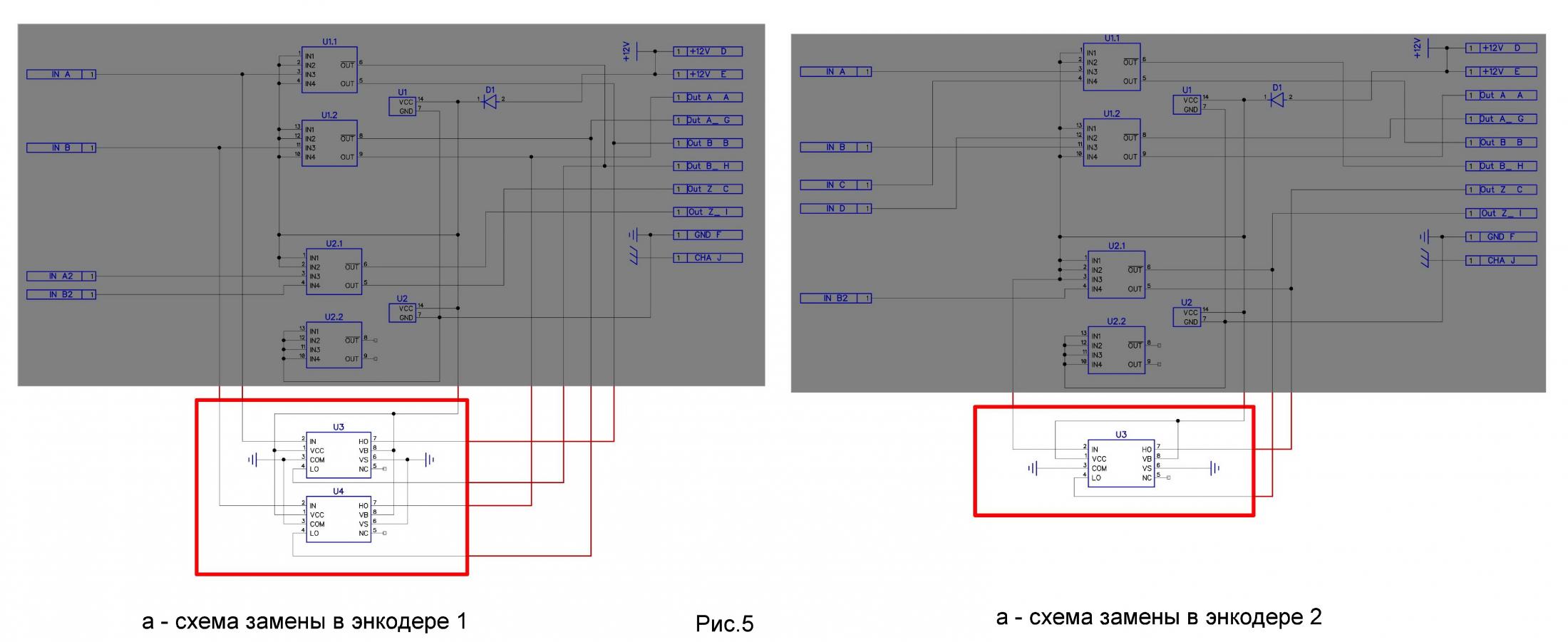
И так, все оригинальные микросхемы (включая исправные) были выпаяны. Вместо них были впаяны качественные панельки с цанговыми зажимами (в т.ч. для быстрой возможной замены неисправных микросхем в будущем). Для замены неисправной микросхемы в первом энкодере на такой же панельке, как те, что были впаяны на места извлеченных микросхем, была смонтирована непосредственно на зажимах панельки пара IR2111 в соответствии с входами и выходами обеих частей оригинальной микросхемы. Замена была облегчена еще и тем, что на первом энкодере во включении "половинок" оригинальных микросхем было задействовано лишь по одному входу от логического 4И. Во втором энкодере, где неисправная микросхема была включена (U1) двумя входами от 4И для каждой из частей микросхемы, на ее место была установлена исправная, ранее присутствовавшая на месте U2. Вместо нее и была установлена, смонтированная на панельке (таким же образом, как и первый заменный суррогат) одиночная IR2111 (показано на рис.4). Панельки со смонтированными суррогатными схемами были вставлены в панельки, распаянные на платах энкодеров. Схема замены показана на рис.5. Таким образом, работоспособность обоих энкодеров была восстановлена.


 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (2) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]