








Поводом для этой статьи явился, принесенный мне на ремонт, руль GW21-FB китайского производства. Обычно в устройствах такого происхождения ужасная механика, дешевые электролитические конденсаторы, не качественная пайка и ремонт не вызывает проблем. Иногда выходит из строя контроллер (как правило бескорпусный, залитый компаундом), в этом случае приходится менять всю плату, т.е. создавать ее заново, т.к. купить ее негде. Если руль (джойстик, геймпад) без обратной связи, то схема получается небольшая и что-либо изобретать нет необходимости - примеров реализации таких устройств в сети предостаточно. Например: Mjoy16 , Analog Joystick
В данном случае обратная связь должна быть, и я, походив по Интернету, с удивлением обнаружил, что ни одной реализации с открытым кодом нет! Многие самодельщики (в основном англо- и немецкоязычные) брались за это, но безрезультатно. Ну, что же, попробуем восполнить этот пробел. И попытаемся сделать это дешево, иначе ремонт может стать просто нерентабельным.
Далее последуют нудные разъяснения, кому это скучно, могут сразу перейти в конец статьи и скачать архив с готовыми схемами, платой, исходниками и прошивками.
Итак, для начала, как же работает "обратная связь"или точнее FFB (Force feedback)? Есть два ее вида - Вибрационная и Активная. В первом случае в устройство просто встроен вибромотор, такой же как в сотовом телефоне, только немного помощнее. В определенные моменты игры, например при столкновении, наезде на препятствие, этот мотор включается и руль (джойстик, геймпад) начинает вибрировать.
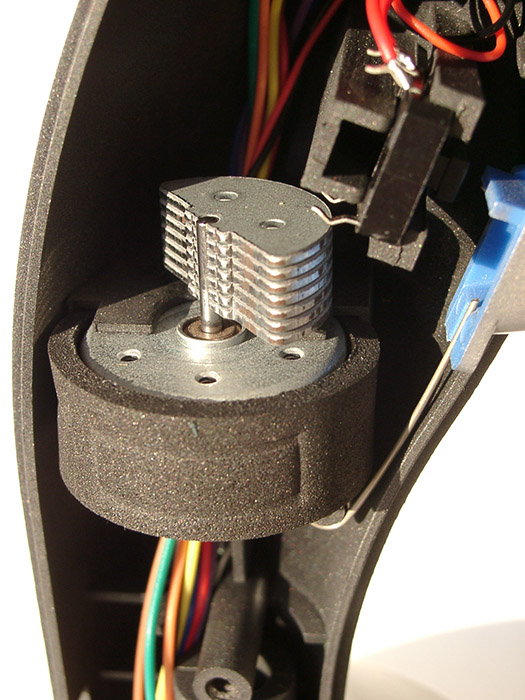
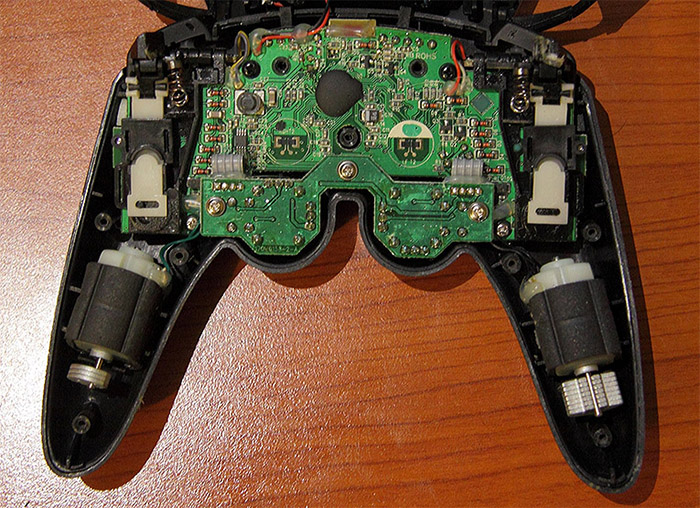
На этом фото показан вибромотор в ручке джойстика. На ось мотора напрессован груз со смещенным центром тяжести. При вращении груза мотор вместе с ручкой начинает вибрировать. Достоверность тактильных ощущений при этом, естественно, не велика, поэтому чаще ставят два мотора. Они одинаковые, но грузы на них разные, поэтому у одного частота вибрации выше, но амплитуда ниже, у другого наоборот - частота ниже, а амплитуда выше. Кроме того, моторы расположены под углом друг к другу, поэтому и направление вибрации различно. Комбинируя одновременное и раздельное включение моторов можно несколько разнообразить тактильные ощущения.
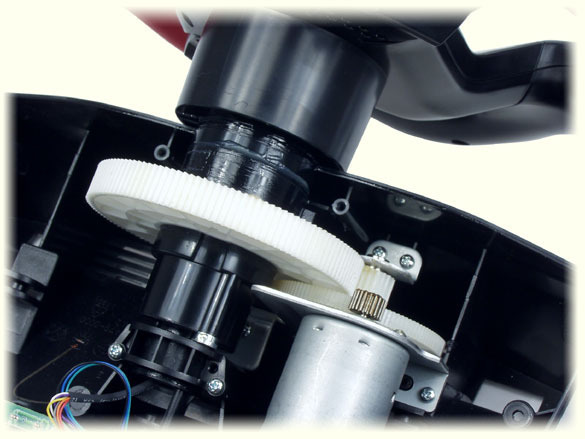
Однако, частоту, амплитуду и, главное, направление вибраций, при таком подходе, варьировать крайне сложно, поэтому в устройствах более высокого класса применяется Активная система FFB. В рулях это мотор, соединенный с колесом руля зубчатой или ременной передачей:
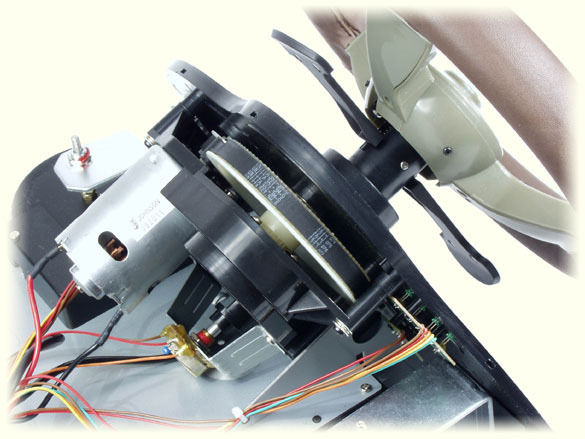
В джойстиках применяют два мотора - по осям X и Y:
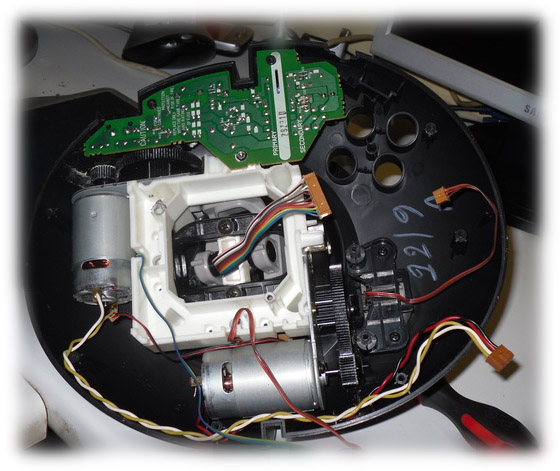
Я не для красоты привожу эти картинки. Возможно кто-то захочет доработать свой "безответный" аппарат системой FFB и они могут послужить наглядным пособием для этого. Как видите, ничего заумно-хитрого здесь нет...
Итак, с механикой все понятно, управление моторами не представляет особой сложности, но нужно знать как и когда их включать/выключать. Требуется получить по шине USB информацию от компьютера. Обычный руль, джойстик, геймпад это HID-устройство, даже не требующее драйвера, они есть в системе, но для FFB все сложнее. Нужно либо представиться системе устройством, способным самостоятельно формировать сигнал управления мотором, получая от компьютера все данные (длина волны, амплитуда, фаза и т.д.), либо использовать драйвер-преобразователь.
В первом случае потребуется постоянно принимать большие объемы информации и иметь контроллер с функциями DSP. Кроме того, нужно глубоко изучить систему формирования сигнала для написания управляющей прошивки при том, что для выставления правильных коэффициентов для DSP потребуется оригинал для сравнения.
Во втором случае можно использовать драйвер готового устройства. Он сам выполнит все нужные преобразования, а нам останется только принимать мгновенные значения силы и направления вращения и подавать их на мотор.
Собственно изначально задача была недорого и без головной боли отремонтировать (переделать) сабж, поэтому выбираем второй вариант. И без стеснений берем драйвер от фирмы Logitech. К концу повествования мы создадим несколько рулей, но начнем с самой сложной модели - G25:

Модель топовая, имеет три педали и 22 кнопки управления. Точнее говоря, из-за рычага переключения передач их кажется меньше, но информация о его положении передается как отдельные кнопки, а нам для выбора схемы важно знать их максимальное число, поэтому запомним - 22 кнопки + 3 педали.
Вот мы и подошли к схемной реализации. Сначала определимся с контроллером:
В современных рулях, джойстиках применяют высокоскоростной протокол USB 2.0, но мы попробуем обойтись низкоскоростным 1.1. Во первых принимаемый/передаваемый объем информации не столь уж велик, а во вторых микроконтроллеры с аппаратным USB довольно дороги, да и конвертеры USB/RS232 тоже. Попробуем применить "ширпотреб" - ATmega8 с программным вариантом реализации USB.
Прежде чем составить схему управления мотором FFB, требуется выяснить, в каком виде драйвер выдает эту информацию. Естественно, никакой документации на него нигде нет, обращение в службу поддержки завершилось отказом - протокол обмена секрет фирмы. Пришлось создать макет устройства, пытаться передавать драйверу данные и изучать его ответы. После нескольких дней мучений удалось выяснить, что комбинация
11 08 ХХ 80 00 00 00
означает включение мотора FFB, при этом ХХ определяет силу и направление вращения. ХХ принимает значение от 0 до 255, при этом 128 - "начало координат", все, что меньше - вращение влево, больше- вращение вправо. Т.е. данные можно сразу подавать на 8-битный ШИМ с мостовой схемой включения мотора. Комбинация
13 00 00 00 00 00 00
означает выключение мотора. Это тоже важно, т.к. при ШИМ=128 мотор, конечно, не крутится, но ток через него идет и, если уж компьютер разрешает, то лучше ток отключать.
Итак со схемой теперь все понятно:
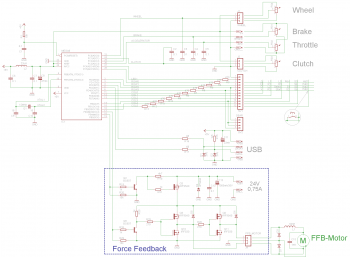
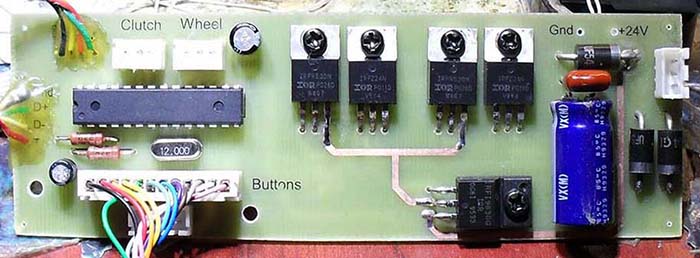
Чтобы меньше сверлить отверстий в плате, применим SMD резисторы и конденсаторы:
Прошивку контроллера напишем в среде Bascom-AVR . Для программной реализации USB воспользуемся библиотекой SWUSB.LBX . Для удобства работы оформим дескрипторы и константы USB отдельными файлами, соответственно Descriptors.inc и USB_config.inc.
Сразу зададим начальное состояние портов ввода/вывода:
Ddrb = &B00011000 'направление линий порта B: 1 - на вывод Portb = &B00100111 'исходное состояние линий B Ddrc = &B00110000 'направление линий порта C: 1 - на вывод Portc = &B00000000 'исходное состояние линий C Ddrd = &B00010011 'направление линий порта D: 1 - на вывод Portd = &B11100000 'исходное состояние линий D
Назначим выводы D+ и D- для USB (D+ должна быть на INT0):
_usb_port Alias Portd _usb_pin Alias Pind _usb_ddr Alias Ddrd Const _usb_dplus = 2 Const _usb_dminus = 3
Зададим PID и VID, соответствующие Logitech G25:
Const _usb_vid = &H046D 'Vendor ID Const _usb_pid = &HC299 'Product ID
В нашем распоряжении всего 8 байт для передачи хосту, а устройство имеет , как мы помним, 22 кнопки, руль и три педали. Плюс к этому нужно еще передать байт "Combined Pedals" - как выяснилось, при активации/деактивации этой опции драйвер не передает никаких управляющих сигналов устройству и даже не пытается скомбинировать этот режим из имеющейся информации о педалях. Оригинального дескриптора достать не удалось, да он нам и не помог бы, ведь настоящий G25 работает в USB 2.0 и не ограничен пространством - может передавать до 64 байт за раз. Поэтому пришлось ограничить разрядность данных для педалей до 7 бит, а для руля до 12 бит, и репорт-дескриптор в финале получился таким:
Data &H05 , &H01 ' Usage Page (Desktop), Data &H09 , &H04 ' Usage (Joystik), Data &HA1 , &H01 ' Collection (Application), Data &HA1 , &H02 ' Collection (Logical), Data &H95 , &H01 ' Report Count (1 field), Data &H75 , &H0C ' Report Size (12 bit), Data &H14 ' Logical Minimum (0), Data &H26 , &HFF , &H0F ' Logical Maximum (4095), Data &H34 ' Physical Minimum (0), Data &H46 , &HFF , &H0F ' Physical Maximum (4095), Data &H09 , &H30 ' Usage (X), Data &H81 , &H02 ' >>>> Input (Variable), *** Wheel *** Data &H05 , &H01 ' Usage Page (Desktop), Data &H95 , &H01 ' Report Count (1 field), Data &H75 , &H04 ' Report Size (4 bit), Data &H25 , &H07 ' Logical Maximum (7), Data &H46 , &H3B , &H01 ' Physical Maximum (315), Data &H65 , &H14 ' Unit (Degrees), Data &H09 , &H39 ' Usage (Hat Switch), Data &H81 , &H42 ' >>>> Input (Variable), *** Hat *** Data &H95 , &H13 ' Report Count (19 fields), Data &H75 , &H01 ' Report Size (1 bit), Data &H25 , &H01 ' Logical Maximum (1), Data &H45 , &H01 ' Physical Maximum (1), Data &H05 , &H09 ' Usage Page (Button), Data &H19 , &H01 ' Usage Minimum (01h), Data &H29 , &H13 ' Usage Maximum (13h), Data &H81 , &H02 ' >>>> Input (Variable), *** Buttons *** Data &H05 , &H01 ' Usage Page (Desktop), Data &H95 , &H01 ' Report Count (1 field), Data &H75 , &H07 ' Report Size (7 bit), Data &H14 ' Logical Minimum (0), Data &H26 , &H7F , &H00 ' Logical Maximum (127), Data &H34 ' Physical Minimum (0), Data &H46 , &H7F , &H00 ' Physical Maximum (127), Data &H09 , &H32 ' Usage (Z), Data &H81 , &H02 ' >>>> Input (Variable), *** Accelerator *** Data &H95 , &H01 ' Report Count (1 field), Data &H75 , &H07 ' Report Size (7 bit), Data &H14 ' Logical Minimum (0), Data &H26 , &H7F , &H00 ' Logical Maximum (127), Data &H34 ' Physical Minimum (0), Data &H46 , &H7F , &H00 ' Physical Maximum (127), Data &H09 , &H35 ' Usage (Rz), Data &H81 , &H02 ' >>>> Input (Variable), *** Brake *** Data &H95 , &H01 ' Report Count (1 field), Data &H75 , &H07 ' Report Size (7 bit), Data &H14 ' Logical Minimum (0), Data &H26 , &H7F , &H00 ' Logical Maximum (127), Data &H34 ' Physical Minimum (0), Data &H46 , &H7F , &H00 ' Physical Maximum (127), Data &H09 , &H36 ' Usage (Slider), Data &H81 , &H02 ' >>>> Input (Variable), *** Clutch *** Data &H95 , &H01 ' Report Count (1 field), Data &H75 , &H08 ' Report Size (8 bit), Data &H14 ' Logical Minimum (0), Data &H26 , &HFF , &H00 ' Logical Maximum (255), Data &H34 ' Physical Minimum (0), Data &H46 , &HFF , &H00 ' Physical Maximum (255), Data &H09 , &H31 ' Usage (Y), Data &H81 , &H02 ' >>>> Input (Variable), *** Combined pedals *** Data &HC0 ' End Collection, Data &HA1 , &H02 ' Collection (Logical), Data &H09 , &H02 ' Usage (02h), Data &H95 , &H07 ' Report Count (7 fields), Data &H91 , &H02 ' <<<< Output (Variable), *** FFB & Control *** Data &HC0 ' End Collection, Data &HC0 ' End Collection
Т.е. получилась дискретность педалей 0,78% , а руля 0,024% . Не так уж и плохо.
Для составления репорт-дескриптора можно воспользоваться справочником HID Usage Tables или специальной программой HID Descriptor tool.
Дескриптор продукта и изготовителя не важны, можно поставить любые - драйвер все равно вместо них подставит в систему название "Logitech G25".
В основной программе принимаем данные от хоста и по первому байту сортируем: если $11 (dec 17), то включаем мотор и выставляем ШИМ, если $13 (dec 19) - выключаем мотор:
Select Case _usb_rx_buffer(2) 'Тип данных Case 17 If _usb_rx_buffer(3) = 8 Then 'Данные ШИМ для мотора Pwm2 = _usb_rx_buffer(4) Ffb_motor = 1 'Включение мотора End If Case 19 'Выключение мотора Pwm2 = 128 Ffb_motor = 0 End Select
Частоту ШИМ задаем 375кГц (12МГц/32), т.о. частота на выходе будет около1,5кГц (375/256):
Config Timer2 = Pwm , Prescale = 32 , Compare Pwm = Clear Up Tccr2.3 = 1 Tccr2.6 = 1
Выше частоту выставлять не рекомендую - транзисторы моста начнут греться, т.к. для их раскачки применен самый примитивный вариант (для удешевления конструкции). При этом в близи среднего положения руля мотор воспроизводит частоту 1,5кГц и для борьбы с этим эффектом последовательно с мотором включен дроссель, а параллельно конденсатор. Если имеются в наличии, то лучше для раскачки применить стандартные драйверы верхнего и нижнего плеч CMOS, тогда частоту ШИМ можно повысить до максимума (47кГц), не опасаясь перегрева и исключить дроссель.
АЦП в ATmega8 10-разрядный, поэтому для получения 12-разрядного значения сложим 4 последовательных значения с потенциометра колеса руля, заодно таким образом уменьшив флуктуации сигнала:
Wheel = 0 For I = 1 To 4 Temp_word = Getadc(0) Wheel = Wheel + Temp_word Next I
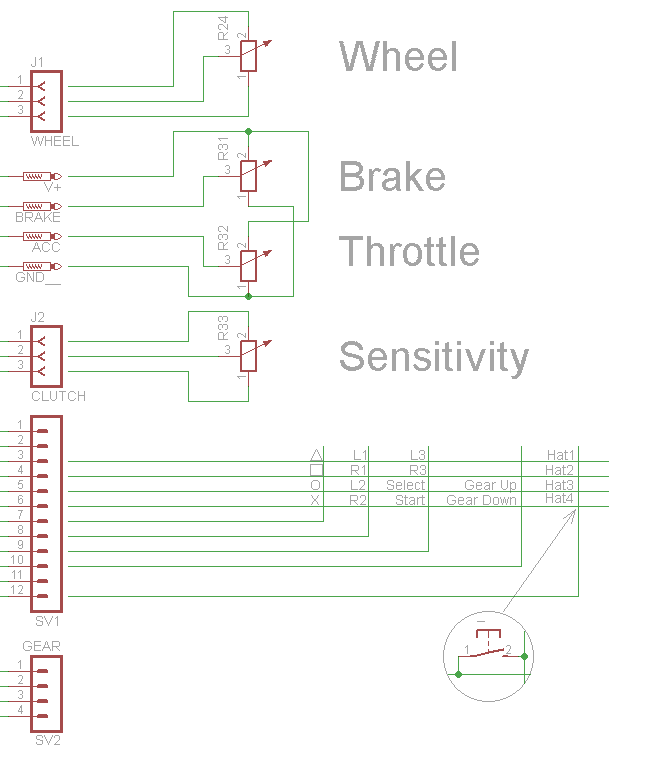
Состояние кнопок определим, выставляя поочередно на линиях Row0... Row3 низкий уровень. Резисторы, включенные в линии кнопок, защищают порты контроллера от короткого замыкания при одновременном нажатии двух и более кнопок. Программно для этого так же предусмотрены защитные временные интервалы.
Разъем GEAR дублирует кнопки S1 и S2 - его наличие необязательно.
На вторую ножку разъема кнопок выведен порт С3 - сюда можно будет подключить светодиод (пока не задействовано).
Данные переключателя видов "HAT" перед передачей хосту нужно перевести в градусы. Дискретность - 45°, при этом отжатое состояние соответствует 360°. Кроме того, эти данные нужно вписать в свободный верхний нибл старшего байта колеса руля, т.к. мы так задали в дескрипторе:
Select Case Hat Case 0 : Wheel.15 = 1 'Hat не нажат 'Case 1 'нажат /\ , все биты = 0 Case 2 : Wheel.13 = 1 'нажат > Case 3 : Wheel.12 = 1 'нажаты /\ и > Case 4 : Wheel.14 = 1 'нажат \/ Case 6 Wheel.12 = 1 : Wheel.13 = 1 'нажаты > и \/ Case 8 Wheel.13 = 1 : Wheel.14 = 1 'нажат < Case 9 Wheel.12 = 1 Wheel.13 = 1 : Wheel.14 = 1 'нажаты < и /\ Case 12 Wheel.12 = 1 : Wheel.14 = 1 'нажаты < и \/ End Select
Потенциометры педалей опрашиваем аналогично колесу руля, так же 4 раза для снижения флуктуаций, затем делим на 32 (сдвигом на 5 разрядов вправо). В результате получаем данные в масштабе 7 бит. Далее создаем "Combined Pedals" - если не нажата педаль "тормоза", то она равна данным педали "газа". Если нажат "тормоз", то равна его инверсии - так требует драйвер.
Accelerator = 0 : Brake = 0 : Clutch = 0 For I = 1 To 4 Temp_word = Getadc(1) 'педаль "Сцепление" Clutch = Clutch + Temp_word Temp_word = Getadc(2) 'педаль "Тормоз" Brake = Brake + Temp_word Temp_word = Getadc(3) 'педаль "Газ" Accelerator = Accelerator + Temp_word Next I Shift Clutch , Right , 5 'масштабирование до 127 Shift Brake , Right , 5 'масштабирование до 127 Shift Accelerator , Right , 5 'масштабирование до 127 Combined_pedals = Accelerator If Brake < 123 Then Combined_pedals = 255 - Brake End If
Далее следует пересортировать биты данных в соответствии с заданной очередностью в репорт-дескрипторе. Обычно такого делать не требуется, но в данном случае мы вынужденно пошли на такие сложности из-за стесненных условий. Зато мы уместили в пакете большой объем информации. После пересортировки передаем данные хосту:
Buffer_6.3 = Accelerator.0 'пересортировка данных для отправки
Buffer_6.4 = Accelerator.1
Buffer_6.5 = Accelerator.2
Buffer_6.6 = Accelerator.3
Buffer_6.7 = Accelerator.4
Buffer_7.0 = Accelerator.5
Buffer_7.1 = Accelerator.6
Buffer_7.2 = Brake.0
Buffer_7.3 = Brake.1
Buffer_7.4 = Brake.2
Buffer_7.5 = Brake.3
Buffer_7.6 = Brake.4
Buffer_7.7 = Brake.5
Buffer_8.0 = Brake.6
Buffer_8.1 = Clutch.0
Buffer_8.2 = Clutch.1
Buffer_8.3 = Clutch.2
Buffer_8.4 = Clutch.3
Buffer_8.5 = Clutch.4
Buffer_8.6 = Clutch.5
Buffer_8.7 = Clutch.6
'------------------------- Отправка данных в ПК --------------------------
_usb_tx_buffer2(2) = Low(wheel)
_usb_tx_buffer2(3) = High(wheel)
_usb_tx_buffer2(4) = Low(buttons)
_usb_tx_buffer2(5) = High(buttons)
_usb_tx_buffer2(6) = Buffer_6
_usb_tx_buffer2(7) = Buffer_7
_usb_tx_buffer2(8) = Buffer_8
_usb_tx_buffer2(9) = Combined_pedals
Call Usb_send(_usb_tx_status2 , 8)
Программа закончена, можно ее скомпилировать и зашить в контроллер.
Скачиваем драйвер с сайта Logitech, устанавливаем его и подключаем наше устройство. Драйвер определит его как G25, заходим в свойства, здесь можно протестировать поворот руля, нажатие педалей - все сразу отразится на экране. Кроме того, нажимая на кнопки, можно протестировать FFB - "езда по деревянному мосту", "лопнувшая покрышка", "взрыв"...
Второй руль, который мы будем создавать - Logitech Driving Force™ Pro:

Это престижная модель с двумя педалями и переключателем передач на встроенной консоли. Передачи переключаются только "вперед/назад". На консоли руля больше кнопок, чем на G25, но их суммарное число меньше - 18. Такая конфигурация очень распространена среди рулей с FFB, поэтому прошивка под нее будет наиболее востребована для ремонта или апгрейда.
Схема остается прежняя, вместо отсутствующей педали сцепления подключим потенциометр чувствительности. С его помощью можно будет, не заходя в настройки, прямо во время игры подстроить силу воздействия FFB:
У нас освободились 11 бит, поэтому мы можем установить на педали разрядность в 8 бит, а на колесо руля - 14. Это повысило точность и плавность управления. Изменения в дескрипторе и программе здесь приводить не буду - их можно посмотреть в прилагаемых исходниках.
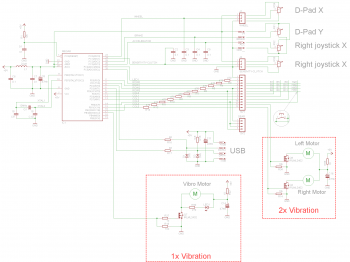
Теперь попробуем сделать геймпад. За основу возьмем Logitech Rumblepad 2:

Здесь FFB вибрационного типа, т.е. установлены два вибромотора, направление вращения которых не регулируется, только скорость. Поэтому вместо мостовой схемы применяются просто ключевые транзисторы и два выхода ШИМ. В ATmega8 два выхода имеет Таймер1, они уже выведены на разъем. Кроме того, для одномоторного случая можно задействовать освободившийся выход Таймера2 и подавать на него мажоритарный уровень левого и правого моторов FFB:
Теперь, не меняя схему и прошивку, можно подключить либо один, либо два мотора, в зависимости от конструкции устройства.
Конфигурируем Таймер1:
Config Timer1 = Pwm , Pwm = 8 , Compare_a_pwm = Clear_up , Compare_b_pwm = Clear_up , Prescale = 8 Compare1a = 0 Compare1b = 0 Config Portb.1 = Output Config Portb.2 = Output
И Таймер2:
Config Timer2 = Pwm , Prescale = 8 , Compare Pwm = Clear Up
Съем данных с потенциометров и кнопок аналогичен предыдущим. Репорт-дескриптор имеет незначительные изменения.
Пакет для отправки хосту имеет следующий вид:
_usb_tx_buffer2(2) = Low(dpad_x)
_usb_tx_buffer2(3) = Low(dpad_y)
_usb_tx_buffer2(4) = Low(rjoy_x)
_usb_tx_buffer2(5) = Low(rjoy_x)
_usb_tx_buffer2(6) = Low(rjoy_y)
_usb_tx_buffer2(7) = Low(buttons)
_usb_tx_buffer2(8) = High(buttons)
_usb_tx_buffer2(9) = 64
Call Usb_send(_usb_tx_status2 , 8)
Последний байт всегда равен 64, таково требование драйвера - это своеобразный пароль.
Вот теперь, собственно, и все. По аналогии с вышеизложенным можно сделать джойстик, самолетный штурвал и проч. В приложении все схемы, пример платы в формате Cadsoft Eagle, исходники и откомпилированные коды. Библиотеку SWUSB.LBX перед компиляцией следует поместить в каталог Lib.
P.S. Использование драйвера не противозаконно, у меня были сомнения на этот счет, поэтому я испросил разрешение у фирмы Logitech и ответ был таков: мы не можем запретить Вам такое использование, однако, в этом случае мы не несем никакой ответственности за ... и т.д.
Последнюю версию драйвера можно скачать здесь.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| IC1 | МК AVR 8-бит | ATmega8 | 1 | Поиск в магазине Отрон | ||
| Q2, Q8 | Биполярный транзистор | BC807 | 2 | Поиск в магазине Отрон | ||
| Q3, Q5, Q6 | MOSFET-транзистор | IRF9540 | 3 | Поиск в магазине Отрон | ||
| Q4, Q7, Q9 | Транзистор | IRLML2402 | 3 | Поиск в магазине Отрон | ||
| Q10, Q11 | MOSFET-транзистор | IRF530 | 2 | Поиск в магазине Отрон | ||
| D1, D2 | Стабилитрон | 3.6 В | 1 | Поиск в магазине Отрон | ||
| D4 | Выпрямительный диод | UF5404 | 1 | Поиск в магазине Отрон | ||
| D3, D5, D6, D7 | Диод | 4 | Поиск в магазине Отрон | |||
| С1-С7, C13 | Конденсатор | 0.1 мкФ | 8 | Поиск в магазине Отрон | ||
| С8, С14, С16 | Электролитический конденсатор | 47 мкФ | 3 | Поиск в магазине Отрон | ||
| С9, С10 | Конденсатор | 18 пФ | 1 | Поиск в магазине Отрон | ||
| С11 | Электролитический конденсатор | 22 мкФ | 1 | Поиск в магазине Отрон | ||
| С12 | Электролитический конденсатор | 1000 мкФ 35В | 1 | Поиск в магазине Отрон | ||
| С15 | Конденсатор | 1 мкФ | 1 | Поиск в магазине Отрон | ||
| R1, R14, R18, R34, R20, R29 | Резистор | 10 кОм | 6 | Поиск в магазине Отрон | ||
| R3-R13 | Резистор | 470 Ом | 10 | Поиск в магазине Отрон | ||
| R15 | Резистор | 1.5 кОм | 1 | Поиск в магазине Отрон | ||
| R16, R17 | Резистор | 68 Ом | 1 | Поиск в магазине Отрон | ||
| R18 | Резистор | 4.7 кОм | 1 | Поиск в магазине Отрон | ||
| R22, R35 | Резистор | 10 Ом | 2 | Поиск в магазине Отрон | ||
| R23 | Резистор | 2 кОм | 1 | Поиск в магазине Отрон | ||
| R24, R31, R32, R33 | Переменный резистор | 4 | Поиск в магазине Отрон | |||
| R25, R26, R30 | Резистор | 270 Ом | 3 | Поиск в магазине Отрон | ||
| R27, R19, R28, R21 | Резистор | 1 кОм | 4 | Поиск в магазине Отрон | ||
| LED1 | Светодиод | 1 | Поиск в магазине Отрон | |||
| Q1 | Кварцевый резонатор | 12 МГц | 1 | Поиск в магазине Отрон | ||
| L1 | Катушка индуктивности | 10 мГн | 1 | Поиск в магазине Отрон | ||
| L2 | Катушка индуктивности | 22 мкГн | 1 | Поиск в магазине Отрон | ||
Скачать список элементов (PDF)
Прикрепленные файлы:
- FFB.zip (365 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить




Комментарии (99) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
1. пуск -> выполнить -> cmd
2. Set devmgr_show_nonpresent_devices=1
3. Devmgmt.msc
4. Вид -> показать скрытые устройства.
5. Удалить отсутствующее устройство в разделе "порты COM и LPT"
Я использую 10-ку и проблем с драйвером особых нет, если следовать инструкции Sulako.
Допустим у вас всего один оборот руля и энкодер на оси руля тоже делает один оборот. Количество тиков вашего энкодера 360.
Тогда вам нужно указать в программе 180 (т.е диапазон будет от -180 до 180 всего 360.
Пример посложнее.
У меня руль 900 градусов, т.е 2.5 оборота, энкодер 600 тиков, на 1 оборот руля приходится 4 оборота энкодера итого 2.5*4*600=6000тиков от одного положения до другого, в прошивке я пишу 3000.
К слову прошивка была обновлена, вы можете найти её в ВКонтакте в группе Logitech Momo Racing
Modification. В комментариях здесь не совсем удобно её выкладывать, так как много было изменений.
Это переросло в мини-проект. И это уже работает.
В общем, сделал и выложил прошивку руля под стандартный драйвер.
Arduinо ProMicro/Leonardo, энкодер или магнитный датчик для оси руля, кучка вариантов подключения осей и кнопок, GUI для настройки, открытый код.
См. github, проект называется AFFBWheel.