








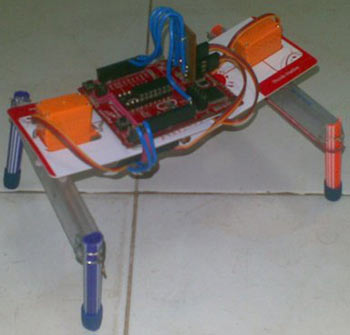
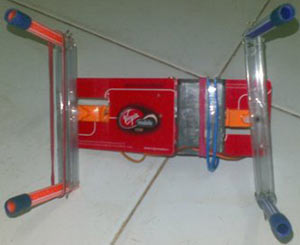
В прошлом месяце я купил два маленьких серводвигателя и долго думал что на них делать. Мой друг предложил мне попробовать сделать четвероногого ходячего робота на двух сервоприводах и показал видео с таким роботом на YouTube. Я заинтересовался и решил сделать что-то подобное. Я начал разрабатывать своего ходячего робота из двух сервоприводов и MSP430 launchpad и результат превзошел мои ожидания. Используемый здесь метод управления сервоприводами отличается от обычного аппаратного ШИМ. Я использовал кольцевой буфер для хранения позиции сервоприводов и значений на выходе. Для этого используется только прерывание таймера. Такой метод обычно применяется в дешевых микроконтроллерах с ограниченным аппаратным ШИМ. Такой программный ШИМ не является идеальным, но его хватает для управления сервоприводами. С помощью этого метода я могу контролировать больше сервоприводов, используя дополнительные выводы ввода / вывода.
Программа для MSP430 пишется на ассемблере только потому, что я хочу попрактиковаться в этом языке программирования. Я использовал ассемблер naken430asm для Linux.
Способ перемещения робота
Представьте, как ходит ящерица или крокодил. Он поднимает одну ногу, двигает её вперёд и опускает её. Это делается по очереди со всеми четырьмя лапами и в результате он движется. Это означает, что мы также нуждаемся в поднятии ног. Но если мы сделаем робота как на верхнем рисунке, то ноги будут постоянно контактировать с землей и движения не будет. Чтобы преодолеть эту проблему, необходимо сделать робота так, как показано на втором рисунке. Между двумя плоскостями с серво есть небольшой наклон.
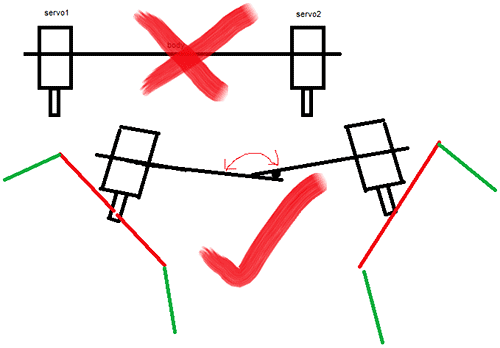
Схема робота
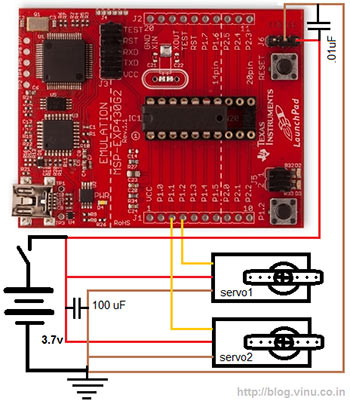
Схема очень проста. Нужно лишь подключить сервоприводы к контактам P1.1 и P1.2 микроконтроллера MSP430G2231 и подключить питание. Я использовал старый 3.7V аккумулятор Nokia BL-5C.
Характеристика сервопривода: Серводвигатель 10г/1,2кг/0.09s Крутящий момент: 1.4kg/cm @ 4.8v, 1.6kg/cm @ 6v Вес: 10г Скорость: 0.10/60deg @ 4.8v, 0.09/60deg @ 6v
Ассемблер Naken430asm есть на сайте Майка Кона
- ti.rar (2 Кб)
 none
none
 Опубликована: 2012 г.
Опубликована: 2012 г.


 Вознаградить
Вознаградить



Комментарии (0) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация