








В статье JETBOT на базе NVIDIA Jetson Nano мы рассмотрели робота jetson на на базе NVIDIA Jetson Nano. Сейчас рассмотрим установку пакетов ROS для управления и навигации на jetbot, чтобы превратить робота в удаленно управляемую движущую платформу.

Robot Operating System (ROS) - это гибкая платформа (фреймворк) для разработки программного обеспечения роботов. Это набор разнообразных инструментов, библиотек и определенных правил, целью которых является упрощение задач разработки ПО роботов.
Используем SD-карту 64 Гб, на которой записан образ NVIDIA JetPack. Образ NVIDIA JetPack основан на базе ОС Ubuntu 18.04. Будем устанавливать версию ROS Melodic (http://wiki.ros.org/melodic).
# Добавляем все репозитории Ubuntu:
sudo apt-add-repository universe sudo apt-add-repository multiverse sudo apt-add-repository restricted
# добавляем репозиторий ROS
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# установим ROS Base
sudo apt-get update sudo apt-get install ros-melodic-ros-base
# добавим пути ROS
sudo sh -c ' echo "source /opt/ros/melodic/setup.bash" >> ~ / .bashrc '
Установим библиотеки Adafruit для поддержки драйверов двигателя TB6612/PCA9685 и отладочного OLED-дисплея SSD1306:
# установка pip
sudo apt-get install python-pip
# установка библиотек Adafruit
pip install Adafruit-MotorHAT pip install Adafruit-SSD1306
Предоставим пользователю доступ к шине i2c:
sudo usermod -aG i2c $USER
Перезагрузим систему, чтобы изменения вступили в силу.
Создайте рабочее пространство ROS Catkin для хранения пакетов ROS:
# создаем рабочую область catkin mkdir -p ~/workspace/catkin_ws/src cd ~/workspace/catkin_ws catkin_make # добавим путь catkin_ws к bashrc sudo sh -c 'echo "source ~/workspace/catkin_ws/devel/setup.bash" >> ~/.bashrc'
Закрываем и заново открываем новое окно терминала, чтобы убедиться, что catkin_ws виден ROS:
echo $ROS_PACKAGE_PATH
Клонируем и собираем пакет jetson-inference. В пакете используется NVIDIA TensorRT для эффективного развертывания нейронных сетей на встроенной платформе Jetson.
# установка git и cmake sudo apt-get install git cmake # клонирование репозитория и подмодулей cd ~/workspace git clone https://github.com/dusty-nv/jetson-inference cd jetson-inference git submodule update --init # сборка из исходного кода mkdir build cd build cmake ../ make
# установить библиотеки
sudo make install
Клонирование и сборка ROS пакет ros_deep_learning
# установить зависимости sudo apt-get install ros-melodic-vision-msgs ros-melodic-image-transport ros-melodic-image-publisher # клонирование репозитория cd ~/workspace/catkin_ws/src git clone https://github.com/dusty-nv/ros_deep_learning # сборка catkin cd ~/workspace/catkin_ws catkin_make
# проверка, что ROS находит пакет что пакет ros_deep_learning
rospack find ros_deep_learning
Клонирование и сборка ROS пакета jetbot_ros
# клонирование репозитория cd ~/workspace/catkin_ws/src git clone https://github.com/dusty-nv/jetbot_ros # сборка пакета cd ~/workspace/catkin_ws $ catkin_make
# проверка, что ROS находит пакет что пакет jetbot_ros $ rospack найти jetbot_ros

Тестирование ros_jetbot Открываем терминал и запускаем roscore Во втором терминале запускаем ноду jetbot_motors
И тут проблема Import error: No module named Adafruit_MotorHAT, хотя библиотеку уже устанавливали (см. выше).
Но библиотека была установлена в python3, а ROS использует python2.7
Установим библиотеку Adafruit_MotorHAT для python2.7
rosrun jetbot_ros jetbot_motors.py И тут проблема Import error: No module named Adafruit_MotorHAT, хотя библиотеку уже устанавливали (см. выше). Но библиотека была установлена в python3, а ROS использует python2.7 Установим библиотеку Adafruit_MotorHAT для python2.7 python2.7 -m pip install Adafruit_MotorHAT Теперь запуск нормальный и в следующем терминале проверяем, что в ROS запущены соответствующие ноды и топики Вот список топиков
/jetbot_motors/cmd_dir - relative heading (degree [-180.0, 180.0], speed [-1.0, 1.0])
/jetbot_motors/cmd_raw - raw L/R motor commands (speed [-1.0, 1.0], speed [-1.0, 1.0])
/jetbot_motors/cmd_str - simple string commands (left/right/forward/backward/stop)
Но, к сожалению в jetbot_motors.py прописана обработка сообщений, получаемых из топика /jetbot_motors/cmd_str
Пробуем отправлять их из терминала (это движения вперед, назад, влево, вправо и остановка)
rostopic pub /jetbot_motors/cmd_str std_msgs/String --once "forward" rostopic pub /jetbot_motors/cmd_str std_msgs/String --once "backward" rostopic pub /jetbot_motors/cmd_str std_msgs/String --once "left" rostopic pub /jetbot_motors/cmd_str std_msgs/String --once "right" rostopic pub /jetbot_motors/cmd_str std_msgs/String --once "stop"
Опять проблема !!! Никаких признаков движения. Требуется внести изменения в файл jetbot_motors.py, изменить функции set_speed() и all_stop().
Я создал новый файл jetbot_motors_1.py и внес следующие изменения изменения
# sets motor speed between [-1.0, 1.0]
def set_speed(motor_ID, value):
max_pwm = 200.0
speed = int(min(max(abs(value * max_pwm), 0), max_pwm))
a = b = 0
if motor_ID == 1:
motor = motor_left
a=1
b=0
elif motor_ID == 2:
motor = motor_right
a=2
b=3
else:
rospy.logerror('set_speed(%d, %f) -> invalid motor_ID=%d', motor_ID, value, motor_ID)
return
motor.setSpeed(speed)
if value < 0:
motor.run(Adafruit_MotorHAT.FORWARD)
motor.MC._pwm.setPWM(a,0,0)
motor.MC._pwm.setPWM(b,0,speed*16)
elif value > 0:
motor.run(Adafruit_MotorHAT.BACKWARD)
motor.MC._pwm.setPWM(a,0,speed*16)
motor.MC._pwm.setPWM(b,0,0)
else:
motor.run(Adafruit_MotorHAT.RELEASE)
motor.MC._pwm.setPWM(a,0,0)
motor.MC._pwm.setPWM(b,0,0)
# stops all motors
def all_stop():
set_speed(motor_left_ID, 0.0)
set_speed(motor_right_ID, 0.0)
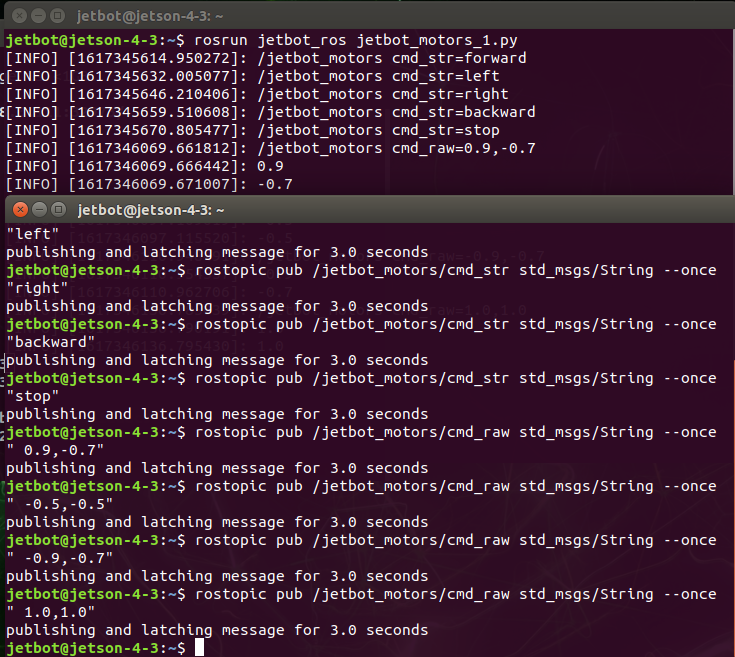
Теперь jetbot реагирует на отправку сообщений, может двигаться вперед, назад, влево, вправо и стоп. Но это все с одной скоростью, регулируемой этим значением
max_pwm = 200.0
Необходимо прописать реализацию движения с разной скоростью. Пока сделаем самое простое, будем использовать отправку сообщений std_msgs/String в топик /jetbot_motors/cmd_raw
# raw L/R motor commands (speed, speed)
def on_cmd_raw(msg):
rospy.loginfo(rospy.get_caller_id() + ' cmd_raw=%s', msg.data)
speeds=msg.data.split(',')
set_speed(motor_left_ID, float(speeds[0]))
set_speed(motor_right_ID, float(speeds[1]))
И проверяем, отправляю подобные команды
rostopic pub /jetbot_motors/cmd_raw std_msgs/String --once " 0.9,-0.7"
Теперь рассмотрим отправку информационных сообщений на OLED дисплей.
Сначала установим библиотеку
python2.7 -m pip install Adafruit_SSD1306
Запускаем ноду jetbot_oled для отображения системной информации и пользовательского текста:
rosrun jetbot_ros jetbot_oled.py
По умолчанию jetbot_oled экран обновляется каждую секунду с последними данными об использовании памяти, дискового пространства и IP-адресов.
Узел также будет прослушивать топик /jetbot_oled/user_text , чтобы получать строковые сообщения от пользователя и отображать на экране
rostopic pub /jetbot_oled/ user_text std_msgs/String --once "HELLO!"
Использование камеры
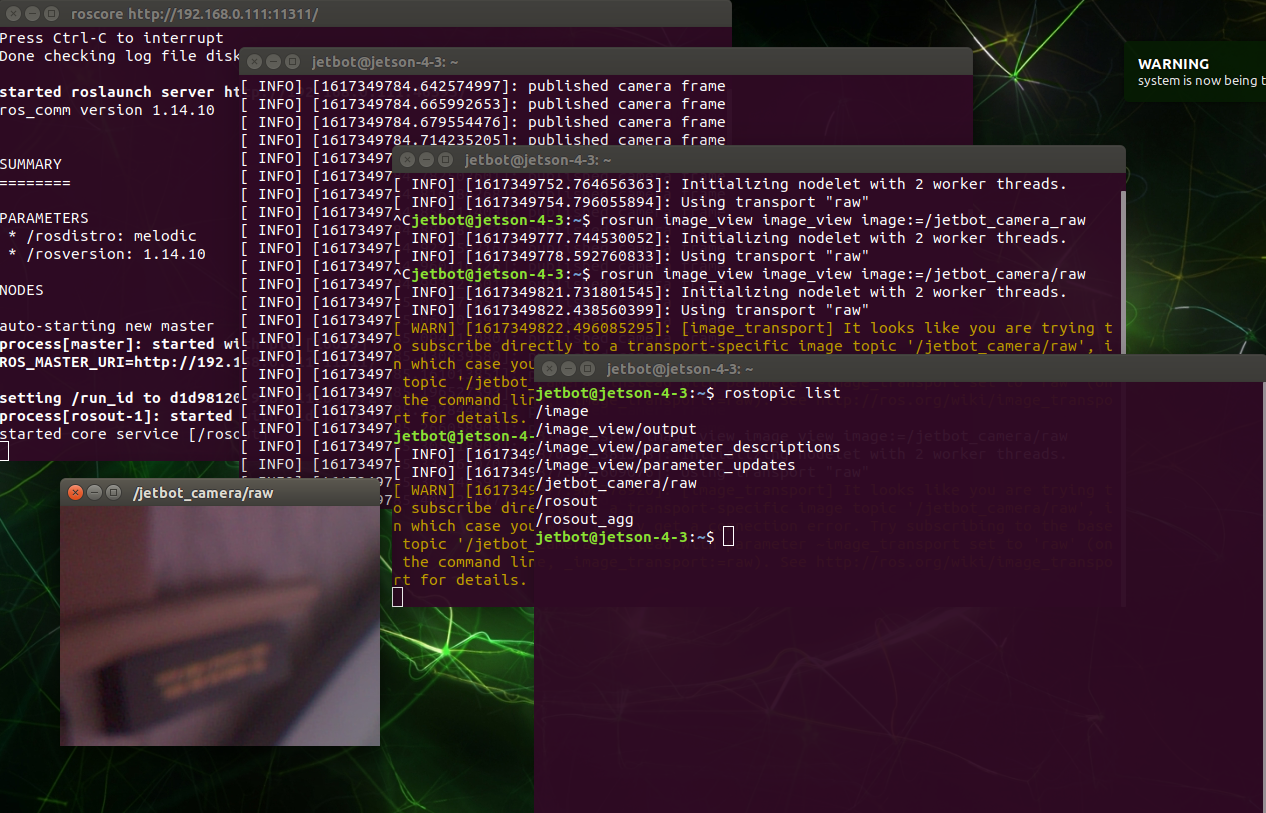
Чтобы начать потоковую передачу с камеры JetBot, запускаем ноду jetbot_camera
rosrun jetbot_ros jetbot_camera
Видеокадры будут публиковаться в топик /jetbot_camera/raw в виде сообщений sensor_msgs::Image в кодировке BGR8.
Установим пакет image_view , а затем подпишимся на него /jetbot_camera/raw с нового терминала:
sudo apt-get install ros-melodic-image-view rosrun image_view image_view image:=/jetbot_camera/raw
После этого должно открыться окно, в котором будет отображаться видео с камеры в реальном времени.
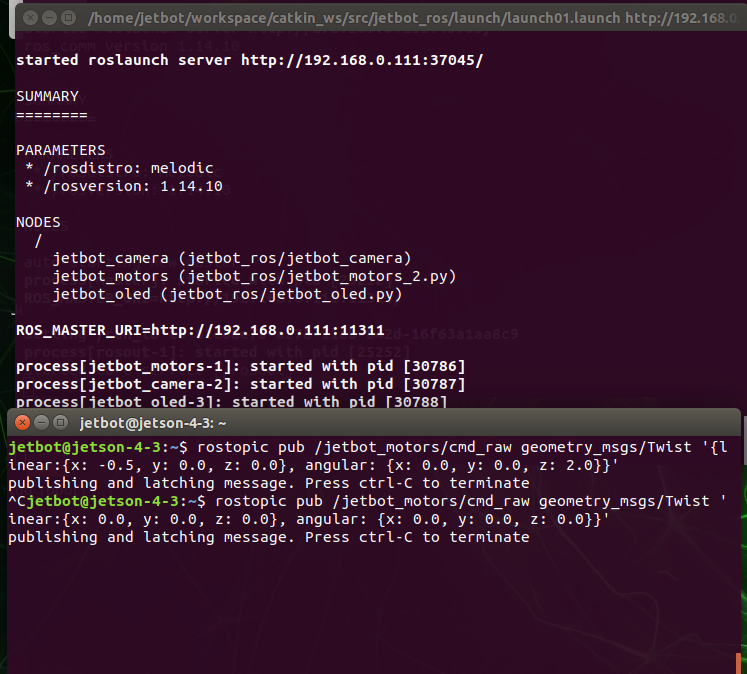
И еще отправку сообщений с тему /jetbot_motors/cmd_raw обязательно надо поменять. А именно тип сообщений на geometry_msgs/Twist, который широко используется в ROS.
Я создал новый файл jetbot_motors_2.py и внес следующие изменения изменения
#!/usr/bin/env python
import rospy
import time
import math
from Adafruit_MotorHAT import Adafruit_MotorHAT
from std_msgs.msg import String
from geometry_msgs.msg import Twist
PWM_MIN=0.5
PWM_MAX=1.0
# sets motor speed between [-1.0, 1.0]
def set_speed(motor_ID, value):
max_pwm = 200.0
speed = int(min(max(abs(value * max_pwm), 0), max_pwm))
a = b = 0
if motor_ID == 1:
motor = motor_left
a=1
b=0
elif motor_ID == 2:
motor = motor_right
a=2
b=3
else:
rospy.logerror('set_speed(%d, %f) -> invalid motor_ID=%d', motor_ID, value, motor_ID)
return
motor.setSpeed(speed)
if value < 0:
motor.run(Adafruit_MotorHAT.FORWARD)
motor.MC._pwm.setPWM(a,0,0)
motor.MC._pwm.setPWM(b,0,speed*16)
elif value > 0:
motor.run(Adafruit_MotorHAT.BACKWARD)
motor.MC._pwm.setPWM(a,0,speed*16)
motor.MC._pwm.setPWM(b,0,0)
else:
motor.run(Adafruit_MotorHAT.RELEASE)
motor.MC._pwm.setPWM(a,0,0)
motor.MC._pwm.setPWM(b,0,0)
# stops all motors
def all_stop():
set_speed(motor_left_ID, 0.0)
set_speed(motor_right_ID, 0.0)
# directional commands (degree, speed)
def on_cmd_dir(msg):
rospy.loginfo(rospy.get_caller_id() + ' cmd_dir=%s', msg.data)
# raw L/R motor commands (speed, speed)
def on_cmd_raw(msg):
rospy.loginfo("msg cmd_raw")
rospy.loginfo(msg)
x=max(min(msg.linear.x,1.0),-1.0)
z=max(min(msg.angular.z,1.0),-1.0)
l=(x-z)/2
r=(x+z)/2
#rospy.loginfo(x)
#rospy.loginfo(z)
#rospy.loginfo(l)
#rospy.loginfo(r)
lpwm= PWM_MIN+math.fabs(l)*(PWM_MAX-PWM_MIN)
rpwm= PWM_MIN+math.fabs(r)*(PWM_MAX-PWM_MIN)
#rospy.loginfo(lpwm)
#rospy.loginfo(rpwm)
kl=1 if l>0 else -1
kr=1 if r>0 else -1
if l==0 : kl=0
if r==0 : kr=0
set_speed(motor_left_ID, kl*lpwm )
set_speed(motor_right_ID, kr*rpwm)
# simple string commands (left/right/forward/backward/stop)
def on_cmd_str(msg):
rospy.loginfo(rospy.get_caller_id() + ' cmd_str=%s', msg.data)
if msg.data.lower() == "left":
set_speed(motor_left_ID, -1.0)
set_speed(motor_right_ID, 1.0)
elif msg.data.lower() == "right":
set_speed(motor_left_ID, 1.0)
set_speed(motor_right_ID, -1.0)
elif msg.data.lower() == "forward":
set_speed(motor_left_ID, 1.0)
set_speed(motor_right_ID, 1.0)
elif msg.data.lower() == "backward":
set_speed(motor_left_ID, -1.0)
set_speed(motor_right_ID, -1.0)
elif msg.data.lower() == "stop":
all_stop()
else:
rospy.logerror(rospy.get_caller_id() + ' invalid cmd_str=%s', msg.data)
# initialization
if __name__ == '__main__':
# setup motor controller
motor_driver = Adafruit_MotorHAT(i2c_bus=1)
motor_left_ID = 1
motor_right_ID = 2
motor_left = motor_driver.getMotor(motor_left_ID)
motor_right = motor_driver.getMotor(motor_right_ID)
# stop the motors as precaution
all_stop()
# setup ros node
rospy.init_node('jetbot_motors')
rospy.Subscriber('~cmd_dir', String, on_cmd_dir)
rospy.Subscriber('~cmd_raw', Twist, on_cmd_raw)
rospy.Subscriber('~cmd_str', String, on_cmd_str)
# start running
rospy.spin()
# stop motors before exiting
all_stop()
Ну и конечно, запуск всех нод запуском командного файла launch. Файл launch01.launch размещаем с catkin_ws/src/jetbot_ros/launch
<launch> <node name="jetbot_motors" pkg="jetbot_ros" type="jetbot_motors_2.py"> </node> <node name="jetbot_camera" pkg="jetbot_ros" type="jetbot_camera"> </node> <node name="jetbot_oled" pkg="jetbot_ros" type="jetbot_oled.py"> </node> </launch>
Запуск командного файла
roslaunch jetbot_ros launch01.launch
Сделаем управление роботом с удаленного компьютера. Будем использовать пакет rosbridge. Rosbridge позволяет внешним клиентам (в нашем случае браузеру) иметь доступ к темам и сервисам ROS (публикация и получение из тем, вызов сервисов). Rosbridge является частью мете-пакета rosbridge_suite, включающего различные дополнительные пакеты для реализации протокола rosbridge.
Пакет rosbridge_suite - это набор пакетов, реализующих протокол rosbridge и обеспечивающих транспортный уровень WebSocket.
В пакеты входят:
-
rosbridge_library - базовый пакет rosbridge. Rosbridge_library отвечает за получение строки JSON и отправку команд в ROS и наоборот.
-
rosapi - делает определенные действия ROS доступными через вызовы служб, которые обычно зарезервированы для клиентских библиотек ROS . Сюда входит получение и установка параметров, получение списка тем и многое другое.
-
rosbridge_server - обеспечивает соединение через WebSocket, чтобы браузеры могли "разговаривать с rosbridge". Roslibjs - это библиотека JavaScript для браузера, которая может взаимодействовать с ROS через rosbridge_server.
Установка пакета
sudo apt-get install ros-melodic-rosbridge-suite
Создаем в папке проекта jetbot_ros в папке launch и командный файл launch03.launch
<launch> <include file="$(find rosbridge_server)/launch/rosbridge_websocket.launch"/> <node name="jetbot_motors" pkg="jetbot_ros" type="jetbot_motors_2.py"> </node> <node name="jetbot_camera" pkg="jetbot_ros" type="jetbot_camera"> </node> <node name="jetbot_oled" pkg="jetbot_ros" type="jetbot_oled.py"> </node> </launch>
И запуск командного файла
1 терминал
roscore
2 терминал
roslaunch jetbot_ros launch03.launch
Для организации web-интерфейса необходимо установить web-сервер.
sudo apt-get install apache2
Теперь в папке /var/www/html будет находиться наша страница html. Библиотеку roslib.min.js поместим в папке js.
Создадим html файл index01.html, где подключимся к ROS по websocket 9090 и будем отправлять из формы сообщения в тему ROS /pub_txt_msg и получать и отображать на странице сообщения, приходящие в тему ROS /sub_txt_msg
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="text/javascript" src="js/roslib.min.js"></script>
<script type="text/javascript" type="text/javascript">
var ros = new ROSLIB.Ros({
url : 'ws://192.168.0.111:9090'
});
ros.on('connection', function() {
document.getElementById("status").innerHTML = "Connected";
});
ros.on('error', function(error) {
document.getElementById("status").innerHTML = "Error";
});
ros.on('close', function() {
document.getElementById("status").innerHTML = "Closed";
});
var txt_listener = new ROSLIB.Topic({
ros : ros,
name : '/sub_txt_msg',
messageType : 'std_msgs/String'
});
txt_listener.subscribe(function(m) {
document.getElementById("msg").innerHTML = m.data;
});
var pub1=new ROSLIB.Topic ({
ros: ros,
name : '/pub_txt_msg',
messageType : 'std_msgs/String'
});
function send_ros() {
var msg=new ROSLIB.Message ({"data" : document.getElementById("putdata").value});
pub1.publish(msg);
}
</script>
</head>
<body>
<h1>Simple ROS User Interface</h1>
<p>Connection status: <span id="status"></span></p>
<p>Last /txt_msg received: <span id="msg"></span></p>
<p><form id=formoptions name=formoptions action="javascript:void();" onsubmit="feturn false;">
send to /pub_txt_msg <br>
<input name=putdata id=putdata>
<button id='button1' value='send' onclick='send_ros();'>Send</button>
</form>
</p>
</body>
</html>
Запускаем в браузере страницу index01.html
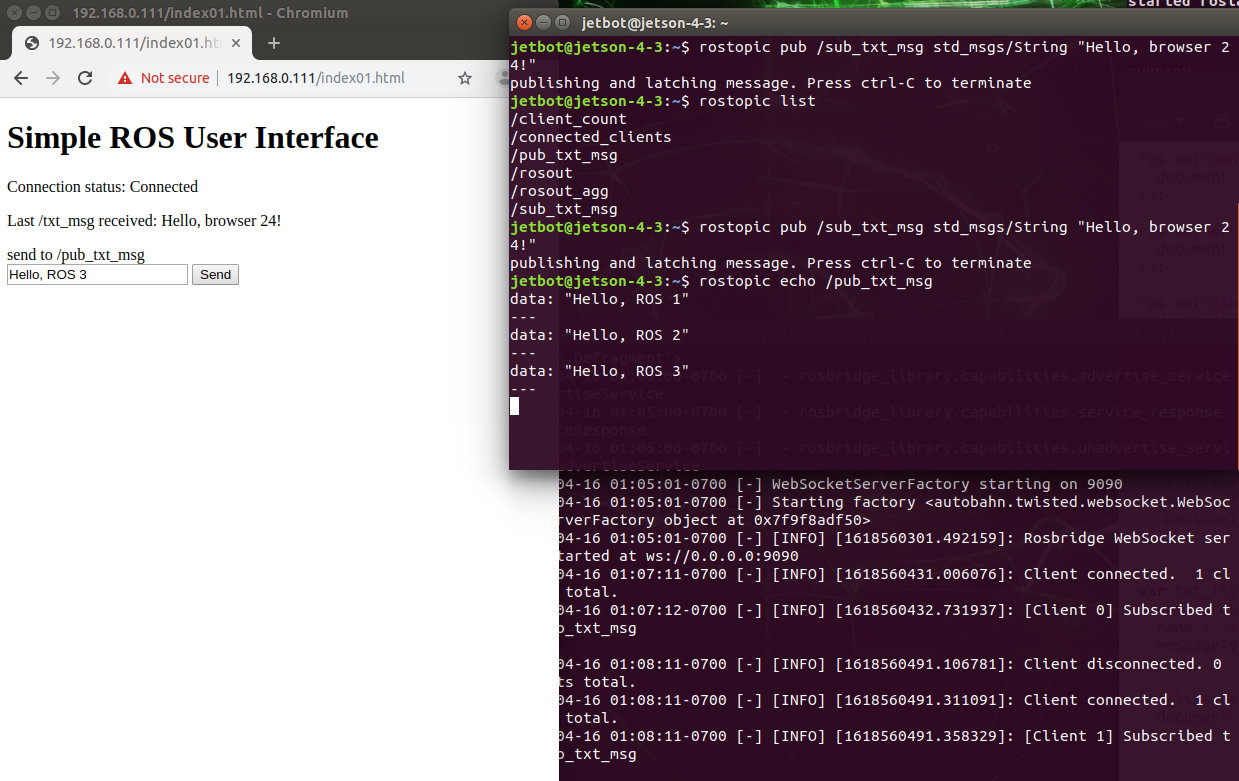
Сообщения в тему /sub_txt_msg
rostopic pub /sub_txt_msg std_msgs/String "Hello? browser"
Просмотр сообщений, отправляемых из браузера в тему /pub_txt_msg
rostopic echo /pub_txt_msg
В дальнейшем запускать все ноды будем из командных файлов
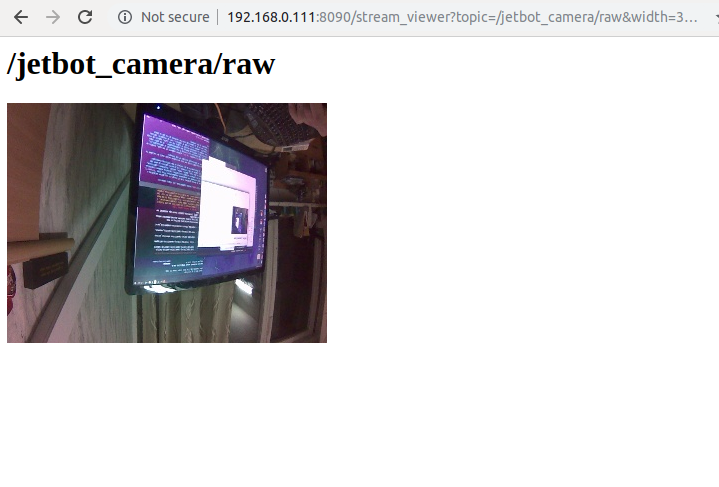
Вывод потокового изображения с камеры на web-страницу
Для вывода потокового изображения с камеры на web-страницу установим ros-пакет web_video_server
sudo apt-get install ros-melodic-web-video-server
Создаем командный файл launch03.launch
<launch>
<include file="$(find rosbridge_server)/launch/rosbridge_websocket.launch"/>
<node name="jetbot_motors" pkg="jetbot_ros" type="jetbot_motors_2.py">
</node>
<node name="jetbot_oled" pkg="jetbot_ros" type="jetbot_oled.py">
</node>
<node name="jetbot_camera" pkg="jetbot_ros" type="jetbot_camera">
</node>
<node name="web_video_server" pkg="web_video_server" type="web_video_server">
<param name="port" value="8090"></param>
<param name="address" value="192.168.0.111"></param>
</node>
</launch>
Просмотр видео на странице
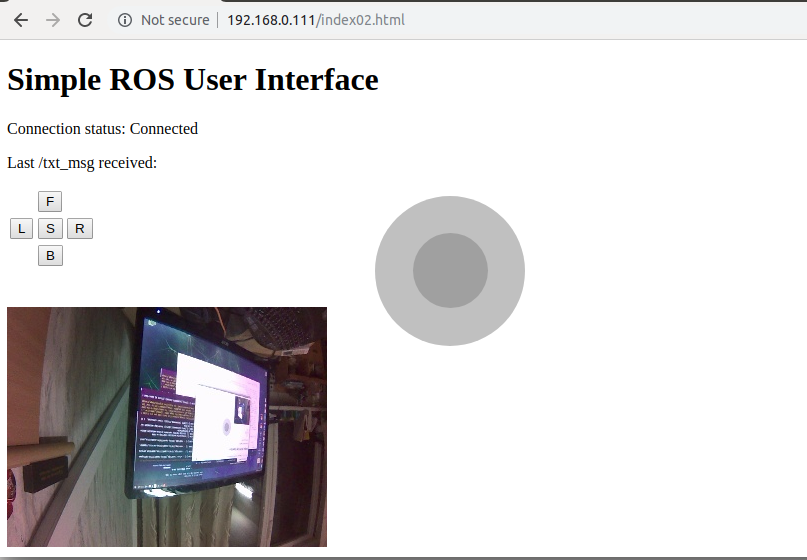
Создаем файл index02.html для управления движением робота и просмотра изображения с камеры. Используем библиотеку nipplejs.js
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="text/javascript" src="js/roslib.min.js"></script>
<script type="text/javascript" src="js/nipplejs.js"></script>
<script type="text/javascript" type="text/javascript">
var ros = new ROSLIB.Ros({
url : 'ws://192.168.0.111:9090'
});
ros.on('connection', function() {
document.getElementById("status").innerHTML = "Connected";
});
ros.on('error', function(error) {
document.getElementById("status").innerHTML = "Error";
});
ros.on('close', function() {
document.getElementById("status").innerHTML = "Closed";
});
var txt_listener = new ROSLIB.Topic({
ros : ros,
name : '/txt_msg',
messageType : 'std_msgs/String'
});
txt_listener.subscribe(function(m) {
document.getElementById("msg").innerHTML = m.data;
});
cmd_vel_listener = new ROSLIB.Topic({
ros : ros,
name : "/cmd_vel",
messageType : 'geometry_msgs/Twist'
});
move = function (linear, angular) {
var twist = new ROSLIB.Message({
linear: {
x: linear,
y: 0,
z: 0
},
angular: {
x: 0,
y: 0,
z: angular
}
});
cmd_vel_listener.publish(twist);
}
createJoystick = function () {
var options = {
zone: document.getElementById('zone_joystick'),
threshold: 0.1,
position: { left: 50 + '%' },
mode: 'static',
size: 150,
color: '#000000',
};
manager = nipplejs.create(options);
linear_speed = 0;
angular_speed = 0;
manager.on('start', function (event, nipple) {
timer = setInterval(function () {
move(linear_speed, angular_speed);
}, 25);
});
manager.on('move', function (event, nipple) {
max_linear = 1.0; // m/s
max_angular = 1.0; // rad/s
max_distance = 75.0; // pixels;
linear_speed = Math.sin(nipple.angle.radian) * max_linear * nipple.distance/max_distance;
angular_speed = -Math.cos(nipple.angle.radian) * max_angular * nipple.distance/max_distance;
});
manager.on('end', function () {
if (timer) {
clearInterval(timer);
}
self.move(0, 0);
});
}
window.onload = function () {
createJoystick();
}
</script>
</head>
<body>
<h1>Simple ROS User Interface</h1>
<p>Connection status: <span id="status"></span></p>
<p>Last /txt_msg received: <span id="msg"></span></p>
<div id="zone_joystick" style="position: relative;"></div>
</body>
</html>
После запуска страницы можем управлять движением робота. Вид страницы
Если необходимо добавить управление с джойстика, то создадим скрипт subscriber, ловящий данные, публикуемые пакетом joy и преобразующий их в данные для ноды /jetbot_motors/cmd_raw.
Содержимое скрипта jetbot_joy.py
#!/usr/bin/env python
import rospy
import time
import math
from sensor_msgs.msg import Joy
from std_msgs.msg import String
from geometry_msgs.msg import Twist
pub=rospy.Publisher("/jetbot_motors/cmd_raw",Twist)
def controller(data):
rospy.loginfo(str(data.axes[0])+" "+str(data.axes[1]))
msg=Twist()
msg.linear.x=data.axes[0];
msg.linear.y=0.0;
msg.linear.z=0.0;
msg.angular.x=0.0;
msg.angular.y=0.0;
msg.angular.z=data.axes[1];
pub.publish(msg)
def listener():
rospy.init_node('jetbot_joy')
rospy.sleep(1.0)
sub = rospy.Subscriber("joy",Joy,controller)
rospy.spin()
if __name__ == '__main__':
listener()
И командный файл launch04.launch
<launch> <include file="$(find rosbridge_server)/launch/rosbridge_websocket.launch"/> <node name="jetbot_motors" pkg="jetbot_ros" type="jetbot_motors_2.py"> </node> <node name="jetbot_oled" pkg="jetbot_ros" type="jetbot_oled.py"> </node> <node name="jetbot_camera" pkg="jetbot_ros" type="jetbot_camera"> </node> <node name="joy_node" pkg="joy" type="joy_node"> </node> <node name="jetbot_joy" pkg="jetbot_ros" type="jetbot_joy.py"> </node> <node name="web_video_server" pkg="web_video_server" type="web_video_server"> <param name="port" value="8090"></param> <param name="address" value="192.168.0.36"></param> </node> </launch>
Прикрепленные файлы:
- ROS_jetbot_01_.zip (9 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (1) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация