









Устройство предназначено для управления соленоидами клапанов гидравлической системы ковша мини-погрузчика. Управление ковшом – гидравлическое и содержит систему клапанов, управляемых соленоидами A, B, C, D (L1…L4). Причем, соленоиды, в свою очередь, управляются интерфейсом джойстика в зависимости от угла наклона джойстика в выбранном направлении. Направления джойстика «вперед-назад» соответствует подъему/опусканию ковша, направления джойстика «влево-вправо» соответствует углу наклона ковша. При этом направление джойстика «вперед» соответствует инициации соленоида A, направление «назад» - B, «влево» - C, «вправо» - D. Понятно, что диагонально направленная рукоять джойстика «влево, вперед» вызовет инициацию соленоидов AC, «вправо, вперед» - AD, «влево-назад» - BC, «вправо-назад» - BD.
Скорость перемещения несущих штанг погрузчика, как и скорость изменения угла положения самого ковша, регламентируется углом наклона джойстика в конкретных направлениях, что, в свою очередь, обусловлено углом поворота штатных потенциометров джойстика. Нейтральное положение рукояти джойстика соответствует центральному положению движков потенциометров, один из которых «разбалансируется» (относительно центра резистивной дорожки) при смещении рукояти джойстика по оси X, другой – по оси Y. Понятно, что «диагональные» смещения рукояти джойстика приводят к одновременной разбалансировке обоих потенциометров.
Усилие, приложенное к клапану соленоидом, определяется величиной электромагнитной индукции, зависящей от величины протекающего через обмотку соленоида постоянного тока, а, следовательно, величиной приложенного к обмотке соленоида напряжения. Однако, управление постоянным током довольно энергозатратно и предполагает значительное рассеяние электрической мощности на регулирующих элементах (каждый из соленоидов потребляет около 750мА при подаче напряжения +24В), приводящее к их избыточному нагреву. Поэтому при проектировании схемы интерфейса был выбран широтно-импульсный вариант управления током обмоток соленоидов. Соответственно, ширина импульсов должна определяться углом наклона рукояти джойстика в выбранном направлении.
При экспериментах с соленоидами некоего электропогрузчика было выявлено, что электромагнитная индукция легко управляется ШИ последовательностью с частотой следования от сотен герц до нескольких десятков килогерц. Понятно, что все соленоиды различны по параметрам и частота следования импульсов должна подбираться (если нет определений относительно конкретного типа) индивидуально, - для предотвращения возможных потерь. Кроме того, например, штатная схема управления соленоидами гидравлики экскаватора CASE CX210B имеет на выходе ШИ последовательность импульсов 19,5кГц, хотя рекомендуемая частота ШИМ для соленоидов PPCD04, используемых в гидросистеме экскаватора, - 100Гц.
В качестве ШИ-генератора была выбрана микросхема TL494, - как наиболее дешевый вариант, допускающий простые схемные решения в управлении ШИМ аналоговым сигналом. Все прочие популярные ШИМ в процессе экспериментов были «отсеяны» из-за сложностей в реализации плавной ШИ регулировки.
Принципиальная электрическая схема первой версии интерфейса представлена на рис.1.
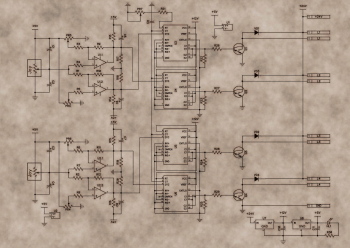
Рис.1 Принципиальная электрическая схема интерфейса джойстика управления ковшом (версия 1)
В первой версии интерфейса использованы сдвоенные ОУ LM358 для каждого из каналов управления («вперед-назад», «вверх-вниз»). В каждом канале один из ОУ имеет «прямое» (неинвертирующее) включение, второй – инверсное. Оба ОУ имеют единичный коэффициент усиления. Каждый из ОУ управляет входом DTC «своего» ШИМ, каждый из которых, в свою очередь, формирует ШИ последовательность для противоположных направлений по одной из осей (X или Y).
Процесс управления соленоидами выглядит следующим образом. Величина напряжения на «прямом» входе ОУ U1.1, снимаемого с движка потенциометра «Joy», сравнивается с частью опорного напряжения на движке подстроечного резистора PR5, подаваемого на инверсный вход этого же ОУ. При нейтральном положении движка потенциометра «Joy», на выходе ОУ U1.1 должно присутствовать напряжение, блокирующее работу выходов E1/E2 U3 (+2,8В приблизительно – зависит от экземпляра МС) – достигается подстройкой PR5 при нейтральном положении движка потенциометра «Joy». При этом контроль осциллографом выходов E1E2 U3 должен фиксировать полное отсутствие импульсов. Для ОУ U1.2 подстройка «нейтрального» значения на его выходе достигается подстройкой PR3. Таким образом, выходы E1E2 обеих микросхем (U3U4) – заблокированы и находятся в состоянии низкого уровня (0В), запирая транзисторы Q1Q2. При смещении движка потенциометра «Joy» вверх по схеме (движение рукояти джойстика в направлении «ВПЕРЕД»), напряжение на инверсном входе U1.2 повышается, напряжение на его выходе снижается, управляя входом DTC U3. Соответственно, в зависимости от изменения угла наклона рукояти джойстика, растет ширина положительных импульсов на E1E2 U3 и остается фиксированным при выбранном положении рукояти. Ток баз транзистора Q1 возрастает пропорционально, на коллекторе Q1 происходит плавное нарастание отрицательных импульсов. Таким образом происходит возрастание тока через соленоид L1 от 0 до максимума - при достижении рукоятью максимального угла в выбранном направлении.
Сигнал с движка потенциометра «Joy», смещаемого вверх по схеме, обеспечивает рост уровня напряжения на выходе ОУ U1.1, не влияющий на состояние выходов E1E2 U3, т.к. все, что выше +2,8В на входе DTC, - блокирует работу микросхемы и транзистор Q2 находится в запертом состоянии.
При плавном смещении движка потенциометра «Joy», вниз по схеме (смещение рукояти джойстика в направлении «НАЗАД»), работа U3 блокируется, а на коллекторе транзистора Q2 растет ширина отрицательных импульсов, обеспечивая нарастающим током соленоид L2.
При возврате рукояти джойстика в нейтральное состояние, работа обеих микросхем U3U4 блокируется, соленоиды L1L2 - обесточиваются.
Т.к. схемотехнически каналы управления соленоидами идентичны, канал управления «ВЛЕВО-ВПРАВО» (U2, U5U6, Q3Q4, L3L4), работает аналогичным, взаимозависимым от рукояти джойстика, образом.
Оба канала управления независимы друг от друга (как и должно быть) и допускают одновременную работу по одному соленоиду по каждому из направлений при выборе любого из «диагональных» положений рукояти джойстика.
Частота микросхем U3U4U5U6 синхронизирована по входам CT и устанавливается подстроечным резистором PR7. Конденсаторы C1...C4 установлены для блокировки возможных наводок в соединительных проводниках между джойстиком и платой интерфейса. C5...C8 блокируют работу выходов E1E2 микросхем U3U4U5U6 на время переходных процессов при подаче питания на плату интерфейса и обеспечивают некоторое сглаживание уровня напряжения на входах DTC микросхем U3U4U5U6 при неровностях движения рукояти джойстика. Чем больше емкость указанных конденсаторов, тем меньше неравномерность роста ширины импульсов на E1E2 микросхем.
Интегральный стабилизатор U8 обеспечивает питание микросхем U1U2 напряжением +5В. Это же напряжение используется в качестве опорного, благодаря чему сокращается количество соединений на плате и не «грузит» встроенные источники опорного напряжения микросхем U3U4U5U6, повышая надежность их эксплуатации. Т.к. для сравнения с потенциалом на движках потенциометров «Joy» используется опорное напряжение, сопротивление каждого из потенциометров «Joy» может быть отличным друг от друга или иного номинала относительно штатного (2кОм).
Интегральный стабилизатор U7 предназначен для питания микросхем U3U4U5U6 и может иметь выходное напряжение +12В…+15В. Подбор резисторов делителей в базовых цепях транзисторов при этом не нужен.
Транзисторы Q1...Q4 - составные типа TIP122. Выбор для такой схемы - оптимальный: в отличии от MOSFET не нужны драйверы для работы на выбранной частоте и, благодаря малому управляющему току, не «грузятся» чрезмерно выходы микросхем U3U4U5U6.
Питание соленоидов ABCD (L1...L4) осуществляется от бортовой сети мини-погрузчика напряжением +24В.
Схема интерфейса была смонтирована на макетной плате и успешно испытана, однако, не в составе оборудования мини-погрузчика МУМС-11 Барс, а на оборудовании экскаватора CASE CX210B.
Фото смонтированного интерфейса на макетной плате показано на рис.2.
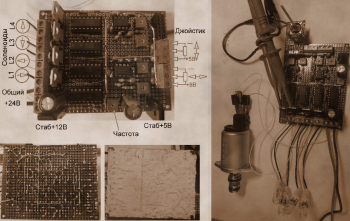
Рис.2 Интерфейс в действующем макете.
В дальнейшем схема интерфейса была оптимизирована. Из схемы интерфейса были исключены ОУ, а потенциометры джойстиков были включены между «прямыми» входами усилителей ошибки «разнонаправленных» ШИ-контроллеров, а движки потенциометров соединены с общим проводом (см. принципиальную схему оптимизированного интерфейса на рис.3).
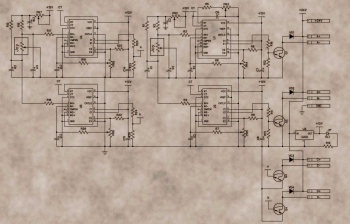
Рис.3 Принципиальная схема второго, оптимизированного варианта интерфейса
При этом уровень постоянного напряжения, присутствующий на «прямых» входах «IN1+» усилителей ошибки пары микросхем U4U5, работающих на разные направления рукояти джойстика, сравнивается с постоянной составляющей на входах «IN1-», образованной импульсами выходов C2 каждой из микросхем либо начальным уровнем смещения. Начальный уровень смещения на входах «IN1-» образуют делители напряжения (PR6R21, например) на выходах C2 микросхем, подстраиваемые по отсутствию сигнала на выходах C2 микросхем U1...U4 при нейтральном положении рукояти джойстика.
Благодаря оптимизации, повышена плавность регулировки ширины импульсов на коллекторах транзисторов Q1...Q4 (а, значит, тока через соленоиды) на начальном участке движения рукояти джойстика.
Схема оптимизированного интерфейса так же была смонтирована на макетной плате (см. рис.4) и успешно испытана в составе оборудования мини-погрузчика МУМС-11 Барс.
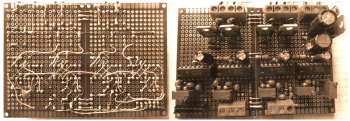
Рис.4 Действующий макет оптимизированного интерфейса
Так же для этой версии интерфейса была разработана печатная плата (показано на рис.5).
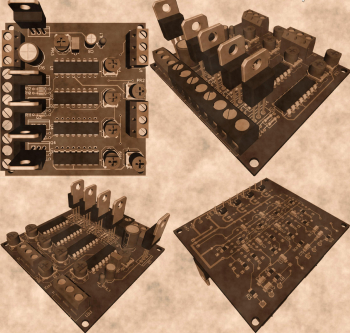
Рис.5 Вид печатной платы оптимизированного интерфейса
Интерфейс джойстика ходовой части мини-погрузчика МУМС-11 Барс
Управление ходовой частью погрузчика – гидравлическое и содержит систему клапанов, управляемых соленоидами A, B, C, D. Соответствие направления джойстика инициируемым соленоидам приведено на рис.6

Рис.6 Соленоиды, инициируемые соответствующими направлениями джойстика
Электрическая часть джойстика состоит из 3-х потенциометров, один из которых ответственен за направление «вперед-назад» (при выборе соответствующего направления рукояти джойстика – инициация соленоидов AC); второй потенциометр поворотом вертикальной оси рукоятки джойстика должен инициировать поворот «влево-вправо», вызывая инициацию соленоидов BC (при вращении рукоятки джойстика влево) или AD (при вращении рукоятки джойстика вправо); третий потенциометр ответственен за совмещенные направления «вперед и вправо» (соленоид C), «вперед и влево» (A), «назад и вправо» (D), «назад и влево» (B). Уже на стадии проектирования управление соленоидами «влево-вправо» путем осевого вращения рукояти джойстика было перенесено на незадействованные, но более логичные соответствующие направления рукояти джойстика. Функции осевого поворота рукояти джойстика были упразднены, как ненужные, снижающие надежность интерфейса в целом. Таким образом, в джойстике было решено задействовать два штатных потенциометра из трех, используя только возможные направления рукояти джойстика. При этом появилась возможность использования схемы описанного выше интерфейса управления ковшом - для преобразования движения рукояти джойстика в ШИ регулирование. Так что, то, что было основой интерфейса управления ковшом, стало входной частью интерфейса управления ходом.
Схема входной части интерфейса «ходового» джойстика показана на рис.7 и отличается от схемы «ковшового» интерфейса наличием компараторов на микросхемах U5U6, которые формируют сигналы разрешения (FRc, RVc, LFc, RTc) для логической части интерфейса, осуществляющей выбор соленоидов в соответствии с направлениями рукояти джойстика (см. таблица на рис.8). Разрешающие сигналы на выходах компараторов формируются разницей уровней на движке подстроечного резистора PR10 (опорное для «прямых» входов всех компараторов) и на крайних выводах потенциометров джойстика («Joy») - для инверсных входов каждого из компараторов.
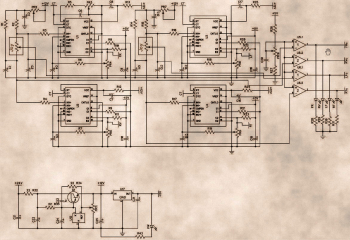
Рис.7 Принципиальная схема входной части интерфейса джойстика управления ходом мини-погрузчика
В U1...U4 задействованы инверсные (коллекторные) выходы C2, выходы которых формируют ШИ последовательности FR, RV, LF, RT для регулирования тока соленоидов, участвующих в выбранном направлении.
Логическая часть схемы интерфейса изображена на рис.8 и состоит из дешифратора U7, преобразующего сигналы разрешения FRc, RVc, LFc, RTc в одну из восьми команд, управляемого дешифратором селектора на микросхемах U8...U11, драйверов U13...U16 и ключей Q2...Q5.
Работа интерфейса происходит следующим образом. В самом начале смещения рукояти джойстика в направлении «ВПЕРЕД», движок потенциометра «Joy», включенный между резисторами R1R2 будет, в соответствии с движением рукояти, смещаться вверх по схеме, уменьшая уровень положительного напряжения на входе IN1+ микросхемы U1. В момент достижения равенства уровней на входах IN1+ и IN1- (уровень на IN1- задается делителем напряжения R10PR4) на выходе C2 U1 появится последовательность коротких отрицательных импульсов с тенденцией увеличения их времени в соответствии с увеличением угла отклонения рукояти джойстика в выбранном направлении. В момент появления первого импульса на выходе C2 или раньше (в зависимости от подстройки PR10), сработает компаратор U5.1, отслеживающий уровень напряжения на нижнем выводе резистора R2 и высокий уровень с выхода U5.1 будет подан на вход A0 дешифратора U7. Низким уровнем на выходе Y1 дешифратор опрокинет выходы элементов «И» U8.1U8.3 в логический ноль, разблокируя элементы «ИЛИ» U9.1U10.1 для трансляции сигнала FR через элементы «И-НЕ» U11.1U11.3 на входы драйверов U13U15. Ключи Q2Q4 отработают по соленоидам AC - в соответствии с таблицей на рис.9. Аналогичным образом, селектором (микросхемы U8...U11) будут отработаны команды дешифратора по выходам Y2 Y4 Y8, инициируя и делая доступными для ШИ регулирования пары соленоидов BD DC AD.
«Диагональные» направления рукояти джойстика отрабатываются выходами дешифратора Y5 Y9 Y6 Y10, активируя соленоиды ACBD - в соответствии с таблицей на рис.9. При этом для ШИ регулирования при «диагональных» направлениях использован лишь один из двух сигналов смежных направлений. Например, при выборе направления «вперед-влево» для регулирования тока соленоида A использован сигнал FR, для C «вперед-вправо» - FR, для B «назад-влево» и D «назад-вправо» - RV.
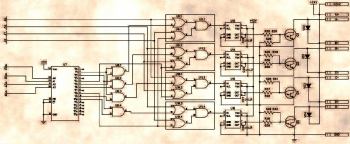
Рис.8 Принципиальная схема логической части интерфейса
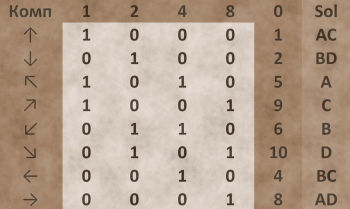
Рис.9 Таблица соответствия направления к выбору соленоидов
Драйверы MOSFET U13...U16, примененные в интерфейсе, - не роскошь, а возможность использования полевых транзисторов в качестве ключей.
Настройка интерфейса сводится к подстройке резисторами PR4PR5PR8PR9 - до отсутствия сигналов FR RV RT LF в нейтральном положении рукояти джойстика и подстройке PR10 до синхронного или близкого срабатывания (высокие уровни FRc RVc RTc LFc) компараторов соответствующего направления с появлением сигналов FR RV RT LF на выходах U1...U4. Подстроечные резисторы PR2PR7, изначально используемые при макетировании, были исключены при разработке печатной платы интерфейса, как избыточные элементы подстройки.
Схема интерфейса джойстика управления ходовой частью мини-погрузчика была выполнена на макетной плате и успешно испытана в составе оборудования МУМС-11 Барс. Вид печатной платы, разработанной для данного интерфейса, приведен на рис.10.
При «настольных» испытаниях вместо соленоидов (ввиду их отсутствия в необходимом количестве) подключались галогенные лампы 12В/35Вт, что максимально визуализировало процесс настройки и испытаний (в дополнение к индикации выходов компараторов на светодиодах). При различной интенсивности свечения ламп совершенно отсутствовал нагрев выходных ключей Q2...Q5 при использовании различных транзисторов в их качестве (TIP122, IRF540, IRF640, IRF840, IRF3710).
Рис.10 Вид печатной платы интерфейса джойстика управления ходом мини-погрузчика
Ток, потребляемый любым из описанных в статье интерфейсов, в пассивном режиме (нейтральные положения рукоятей джойстиков) не превышает 25мА. В активном режиме максимальный потребляемый ток любого из интерфейсов не превышает 100мА. Выходные ключи интерфейсов практически не подвергаются разогреву, но возможность установки радиаторов предусмотрена.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| R1, R2, R14, R15 | Резистор | 13 кОм | 4 | Поиск в магазине Отрон | ||
| R3, R4, R16, R17 | Резистор | 62 кОм | 4 | Поиск в магазине Отрон | ||
| R5, R6, R7, R18, R19 | Резистор | 6k8 | 5 | Поиск в магазине Отрон | ||
| R8, R9, R10, R11, R20, R21, R22, R23, R27 | Резистор | 2k2 | 9 | Поиск в магазине Отрон | ||
| R26, R34 | Резистор | 10 кОм | 2 | Поиск в магазине Отрон | ||
| R12, R13, R24, R25 | Резистор | 33 | 4 | Поиск в магазине Отрон | ||
| R28-R31, R43 | Резистор | 1 кОм | 5 | Поиск в магазине Отрон | ||
| R35-R42 | Резистор | 620 | 8 | Поиск в магазине Отрон | ||
| PR3 | Подстроечный резистор | 50k | 1 | Поиск в магазине Отрон | ||
| PR4, PR5, PR8, PR9, PR11 | Подстроечный резистор | 10k | 4 | Поиск в магазине Отрон | ||
| PR10 | Подстроечный резистор | 5k | 1 | Поиск в магазине Отрон | ||
| R32 | Резистор | 22 | 1 | 1W | Поиск в магазине Отрон | |
| R33 | Резистор | 3k3 | 1 | 0,25W | Поиск в магазине Отрон | |
| C1, C3.C11, C13 | Конденсатор | 2u2 | 4 | Поиск в магазине Отрон | ||
| C4, C5, C14, C15, C20 | Конденсатор | 4u7 | 5 | Поиск в магазине Отрон | ||
| C6 | Конденсатор | 3n9 | 1 | Поиск в магазине Отрон | ||
| C7, C8, C16, C17 | Электролитический конденсатор | 22u | 4 | Поиск в магазине Отрон | ||
| C23 | Конденсатор | 1u | 1 | Поиск в магазине Отрон | ||
| C21, C22 | Электролитический конденсатор | 470u/35V | 2 | Поиск в магазине Отрон | ||
| C24 | Электролитический конденсатор | 47u/25V | 1 | Поиск в магазине Отрон | ||
| U5, U6 | Компаратор | LM393 | 2 | Поиск в магазине Отрон | ||
| U1-U4 | ШИМ контроллер | TL494 | 4 | Поиск в магазине Отрон | ||
| U7 | Микросхема | 74HC154 | 1 | Поиск в магазине Отрон | ||
| U8 | Микросхема | SN74HC08N | 1 | Поиск в магазине Отрон | ||
| U9, U10 | Микросхема | SN74HC32N | 2 | Поиск в магазине Отрон | ||
| U11 | Микросхема | SN74HC132N | 1 | Поиск в магазине Отрон | ||
| U13-U16 | Микросхема | TC4420CPA | 4 | Поиск в магазине Отрон | ||
| U12 | ИС источника опорного напряжения | TL431 | 1 | Поиск в магазине Отрон | ||
| U17 | Микросхема | MC78L05ACP | 1 | Поиск в магазине Отрон | ||
| Q1-Q5 | Биполярный транзистор | TIP122 | 5 | Поиск в магазине Отрон | ||
| VD1-VD4 | Диод | SB310 | 1 | Поиск в магазине Отрон | ||
Скачать список элементов (PDF)
Прикрепленные файлы:
- plata.zip (56 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (4) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]
Наши с вами задачи несколько различны, - у вас потоковое обслуживание техники, у меня разовая акция на заказ. Да, и вовсе нет смысла использовать довольно дорогие МК, когда можно обойтись достаточно дешевыми компонентами при том же самом результате.