








Мне 16 лет и я увлекаюсь электроникой и радиосвязью.Сейчас я участвую в конкурсе “CanSat в России”,где надо собрать пикоспутник весом до 350г. В спутнике нужно обязательно использовать конструктор ,который предоставляют организаторы( конструктор надо покупать; цена для самостоятельной пайки – 10 тыс).

В 1999 году в США прошел первый конкурс CanSat, ставший очень популярным за рубежом. Задача состояла в том, чтобы наглядно продемонстрировать студентам и школьникам процесс от проектирования до запуска автоматического космического аппарата, а также получения с него данных в процессе полета.
CanSat(satellite in a can) –спутник в банке . Это действующая модель нанооспутника весом до 350 граммов. Все основные элементы «спутника»: бортовой компьютер, приёмник-передатчик, научная нагрузка и система питания должны вмещаться в банку объемом 0,5 л. «Спутник» запускается ракетой и за время плавного спуска на парашюте с высоты 1-2 км. должен передать полезную информацию.
Космический образовательный проект «Воздушно-инженерная школа CanSat в России» организован в 2011 году. Организаторами являются НИИ ядерной физики МГУ при поддержке госкорпорации «Роскосмос».
Целью проекта является подготовка нового поколения космических инженеров.
Основная задача Регулярной лиги: передача данных измерений по обязательным исследовательским задачам (барометр, температура, ускорение ) процессе полета аппарата на приемную станцию организаторов.
Про содержание конструктора можете прочитать в презентации,в прикрепленном файле.
У конструктора имеются свои недостатки.
- Большой размер
- Радиодетали морально устарели
- Радиомодуль передает на маленькие расстояние
- Нету возможности сохранять большое количество научных данных в EEPROM
- Использование большое количество проводов
Платы и компоненты в конструкторе уже морально устарели. Они не мощные, не могут выполнять сложные задачи и возможности деталей низкие.
Электроника
Я решил сделать свой конструктор для спутника КанСат по новым конструкторским схематическим решениям.
Первым шагом я выбирал микроконтроллер. В итоге я остановился на STM32. STM32 – это платформа, в основе которой лежат микроконтроллеры STMicroelectronics на базе ARM процессора. Решения на базе STM активно используются благодаря производительности микроконтроллера, его удачной архитектуре, малом энергопотреблении, небольшой цене.
Вторым шагом я придумал какую задачу будет выполнять плата и выбирал компоненты.
STM32 будет выполнять следующие задачи:
- Сбор данных с барометра,акселерометра,гироскопа.
- Получение GPS координат
- Запись на SD
- Передача телеметрии с помощью радиомодуля
В качестве датчика температуры я использовал BME280. В этот датчик входит измеритель температуры, давления и влажности воздуха.

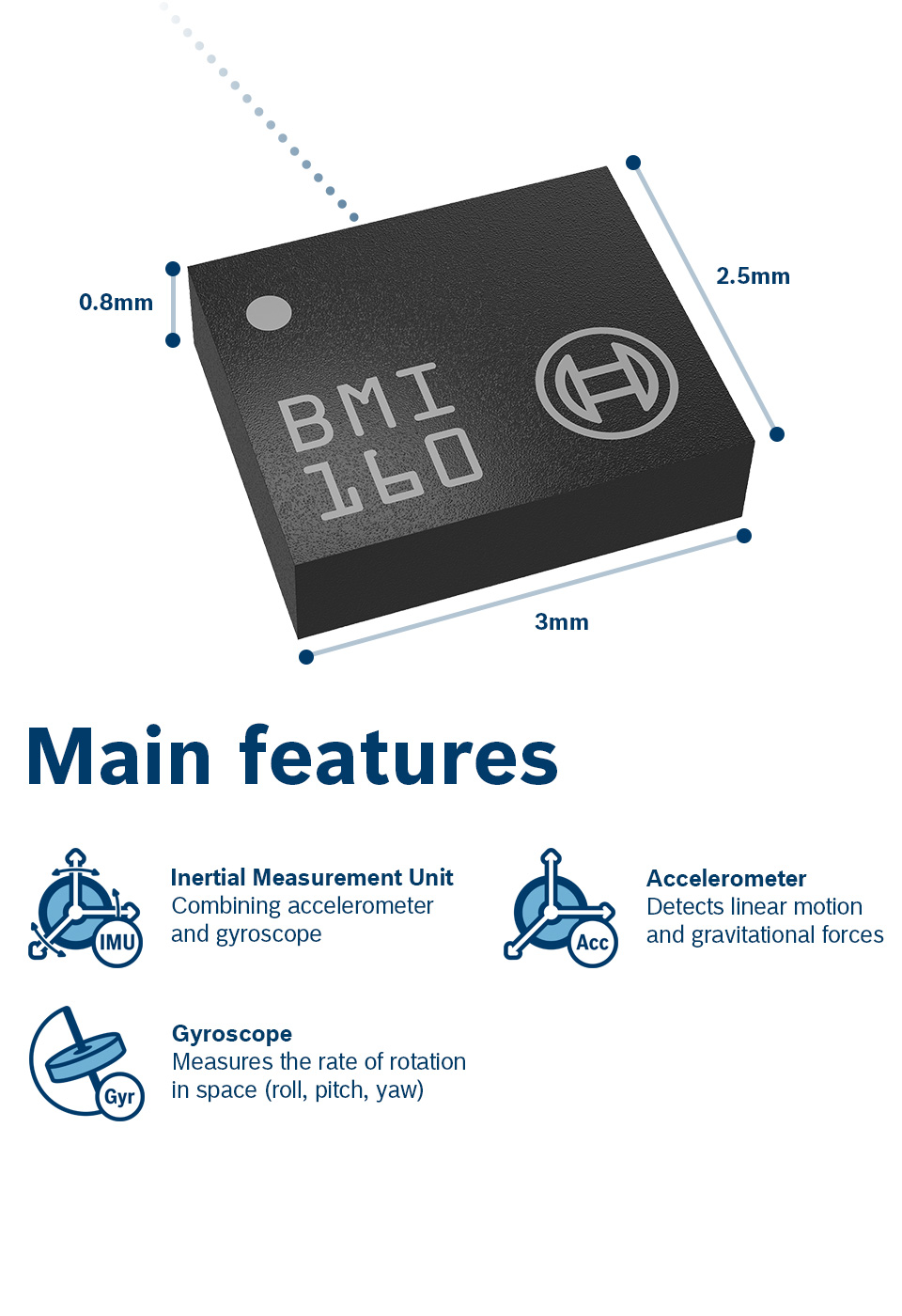
Для отслеживания ориентации спутника я использовал BMI160. Датчик измеряет данные акселерометра и гироскопа.
Для передачи научных данных на землю нужен радиомодуль. Я остановился на трансивере LORA RA – 02.

Чтобы плата питалась от li-po аккумулятора нужен повышающий преобразователь на 5v. Я использовал микросхему LT1308.
Дальше я нарисовал принципиальную схему и развел плату в программе KiCad.
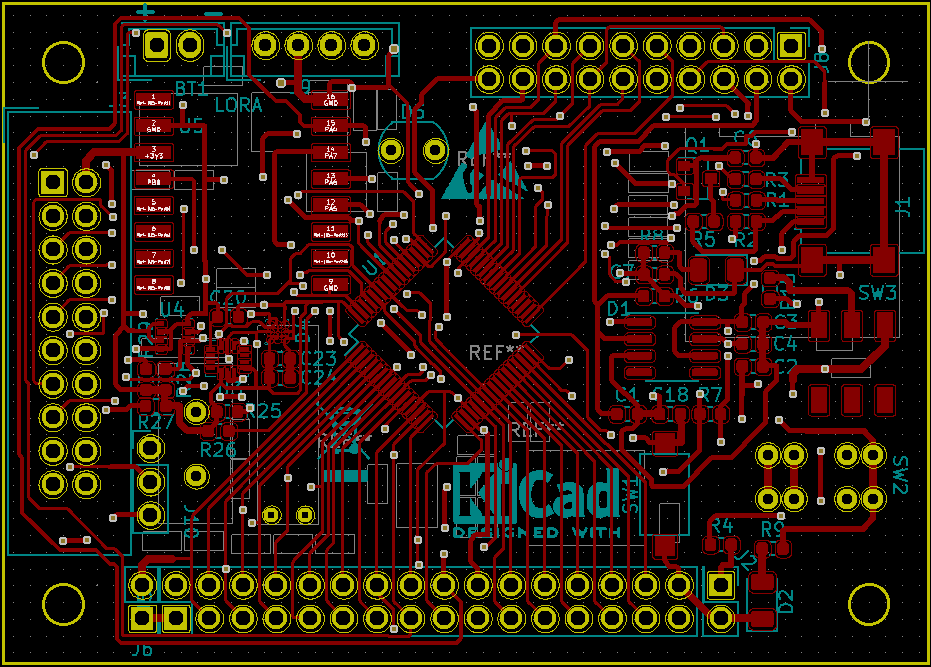
Верхний слой платы
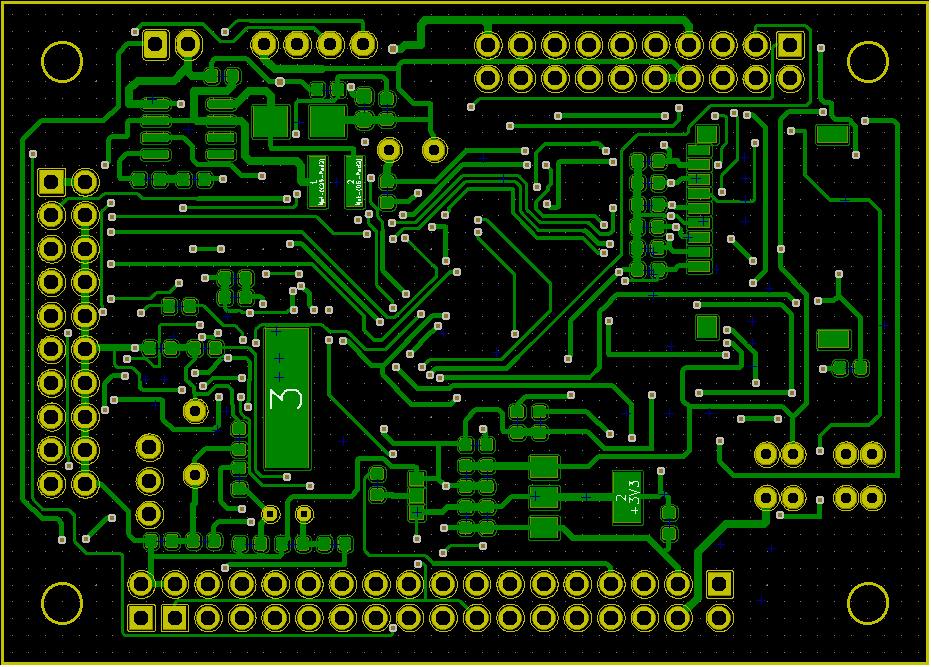
Нижний слой платы
Четвертым шагом я заказал плату на изготовление в Китае. В этот момент мне сильно помогли две компании. Первая компания –это PCBWAY, она спонсировала изготовление платы,за что я очень благодарен.
Вторая компания – это LCSC, которая предоставила необходимые компоненты для платы.Я очень благодарю за помощь спонсоров.
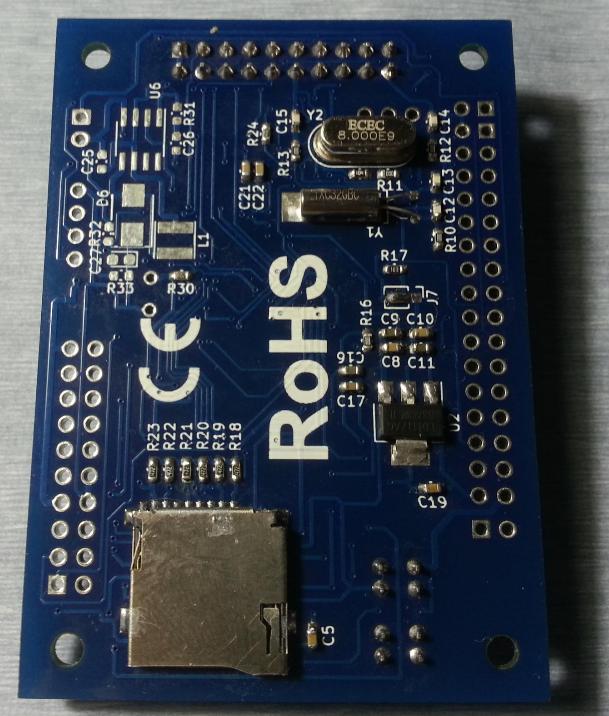
Пайка компонентов проходила следующим образом:
1 – Детали находящиеся на верхнем слою (кроме кнопок и разъем mini usb) паялись в паяльной печке.
2 – Так как детали находящиеся на нижнем слое слишком маленькие, мне пришлось паять в ручную под микроскопом.
И вот готовый результат.

Потом я выбирал среду разработки кода для проверки работоспособности моей платы. Программу можно загрузить с помощью программатора ST-LINK V2.
Я использовал следующие среды разработки:
STM32CubeMX – это генератор кода для семейства STM32, позволяющий автоматически настроить всю периферию для данного микроконтроллера.
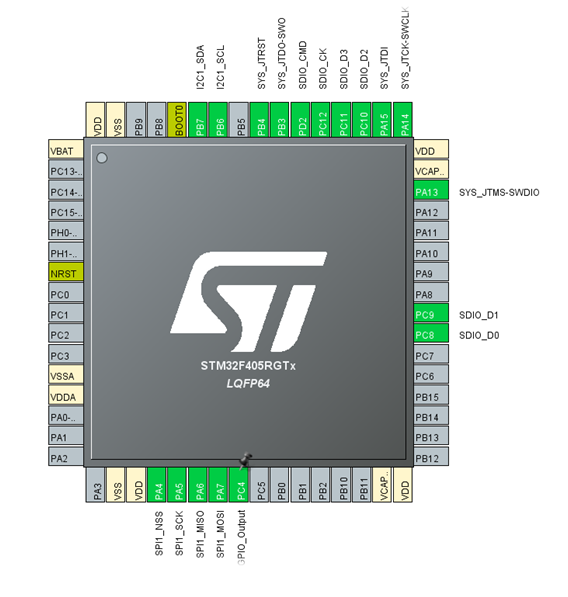
Настройки микроконтроллера stm32f405.
TrueSTUDIO — интегрированная среда, используемая для разработки встраиваемого ПО для микроконтроллеров STM32.
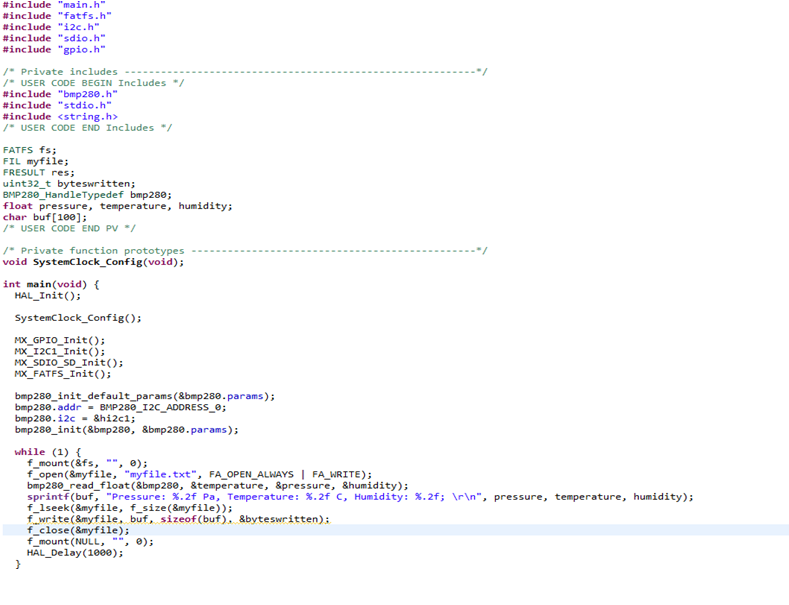
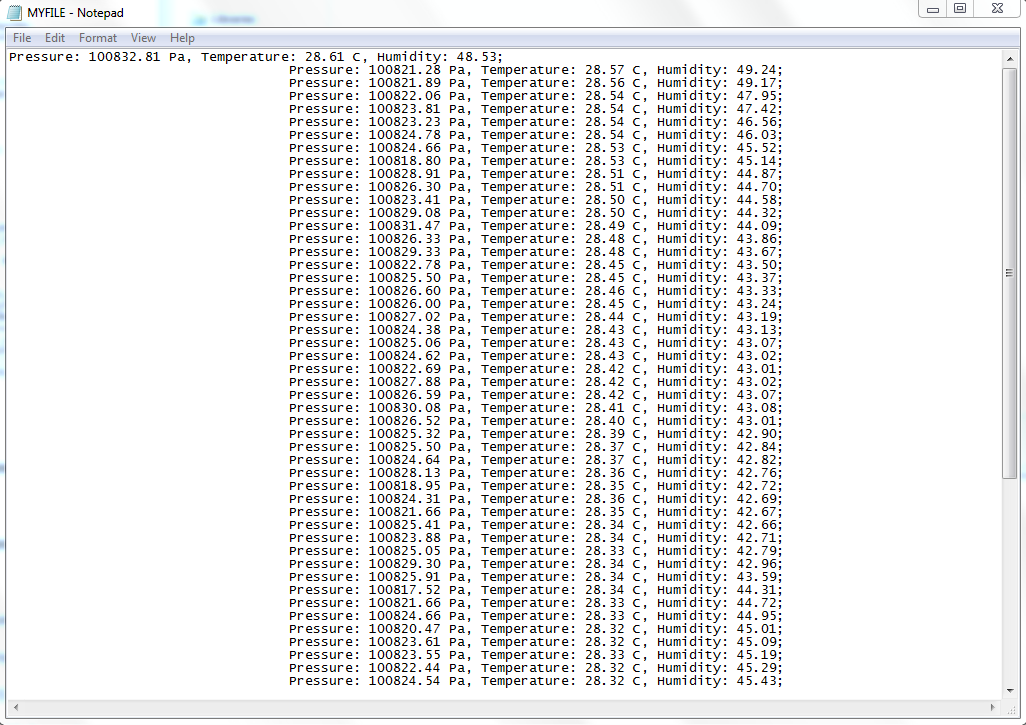
Отрывок программы,который записывает данные от датчиков на sd карту.
Сейчас я пишу программу для радиомодуля.
Краткие технические параметры
- Высокопроизводительный микроконтроллер STM32F405RGT6
- Ядро: Cortex-M4 32-битный
- Рабочая частота: 168 МГц
- Рабочее напряжение: 1,8 В-3,6 В
- Память: 1 МБ Flash, 192 + 4 КБ SRAM
- Программирование: поддерживает интерфейсы JTAG / SWD
- 8M; 32. 768 кристалл
- Интерфейс JTAG / SWD: для отладки /программирования
- Встроенный радиомодуль LORA RA-02 (10km) ; датчики BMI160,BMM150,BME280 контакты для подключения GPS.
- Возможность подулючения аккумулятора li-po 3.7в.
- Сохранение информации на SD карту.

Приемная станция
Для приема телеметрии с радиомодуля платы нужна приемная станция.
Антенна — это устройство, предназначенное для излучения или приёма радиоволн.
Антенны бывают разных видов: спиралевидная, антенна волновой канал (антенна яги), диполь и т.д.

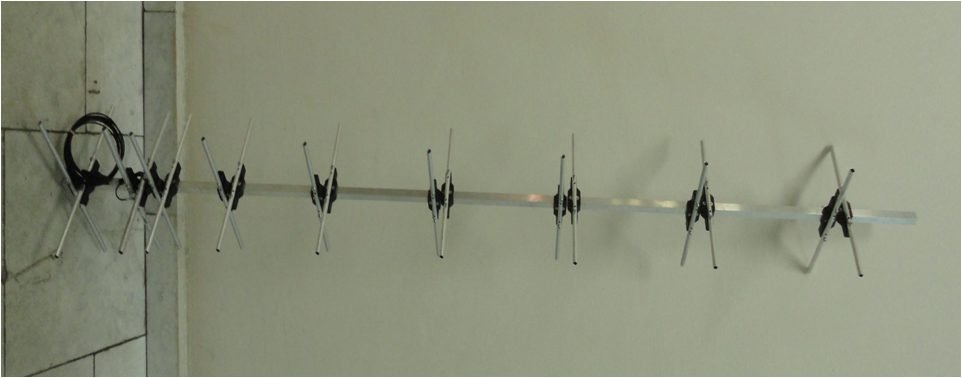
Я остановился на антенне волновой канал ( антенна яги - уда).
Антенна Яги – направленная антенна, состоящая из нескольких параллельных элементов, расположенных на одной линии.

Направленные антенны имеют преимущество по дальности связи при прочих равных, но по определённым направлениям. Направленные антенны позволяют увеличить дальность и качество приема сигнала от базовых станции или репитеров в заданном направлении.
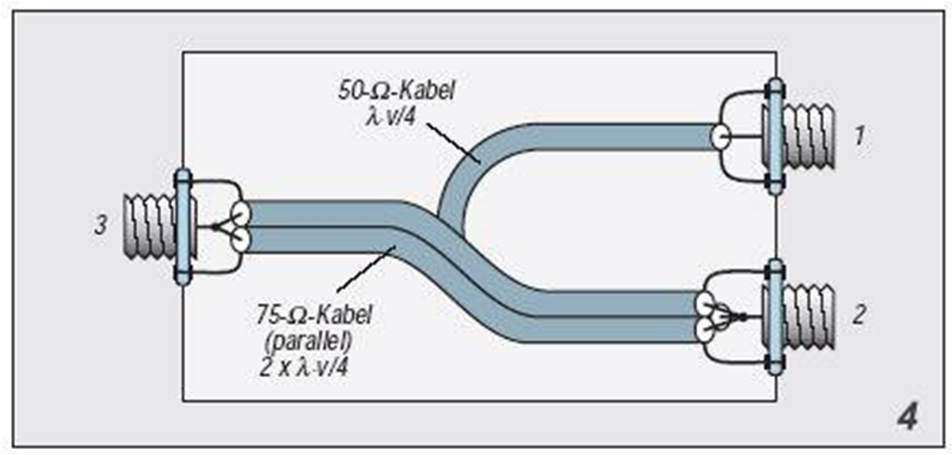
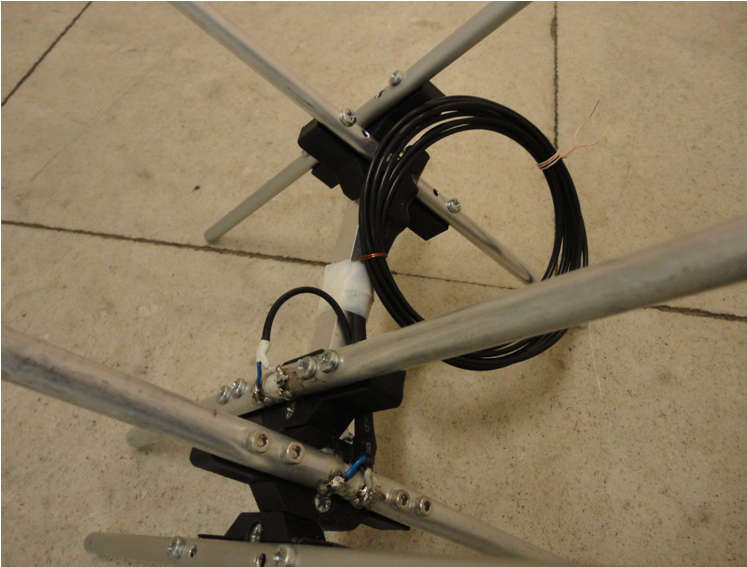
Я решил сделать кросс яги,так как я делаю антенну еще для приема орбитальных спутников.
Для того, чтобы антенна принимала радиоволны в круговой поляризации, нужно иметь 2 коаксиальных кабеля 50 ом.

Надо соединить следующим образом:
Правая круговая поляризация: горизонтальная плоскость к разъему 1, вертикаль к разъему 2, к разъему станции 3
Конечный результат:
В изготовлении антенны мне помог радиолюбитель (RG4D) из завода РЭМО г.Саратов
Через неделю планируется проверка антенны на векторном анализаторе цепей.
До зимы я планирую собрать спутник CanSat с моей платой. Запуск спутника будет проходить в финале конкурса летом 2020г.
Я очень благодарен в помощи изготовления платы , антенны и хотел бы привлечь инженеров в этот проект, потому что если доработать плату,то можно выпускать на производство и мне это тоже будет полезно.
Список литературы:
- https://arduinomaster.ru/stm32/stm32-mikrokontroller-dlya-nachinayushhih-posle-arduino/
- http://dg7ybn.de/Building/Building.htm
- http://radioaficion.com/mods/16-element-dk7zb-70cm-yagi-antenna/
- http://roscansat.com/
- D. Jefferies, «Yagi-Uda antennas». 2004.
- Практическое руководство по программированию STM – микроконтроллеров (С.Н.Торгаев, М.В.Тригуб)
Прикрепленные файлы:
- STM32F4-gerber.rar (280 Кб)
- kicad-pcb.rar (355 Кб)
- STM.pdf (134 Кб)
- CanSat1-program.rar (1427 Кб)
- STM32-pcb_bom.xlsx (15 Кб)
- Konkurs_Kosmos_orig.pdf (5537 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить




Комментарии (13) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]
Раз уж это проект микроспутника, то посчитай потребление каждого узла до наноампер и минимизируй: deep sleep и т.д. Сделай диаграмму потребления(типа Power Tree). Все силовые узлы нужно сделать с максимальным КПД, пусть опытный образец будет дороже.
Далее: Много пустого места на плате, подумай про установку дополнительных модулей микросхем. Что -нибудь околонаучного. Это будет преимуществом на конкурсе. Про монтаж: рекомендую перевести все на СМД, кроме разъемов. Добавь ВЧ разъем SMA на плату для внешней антенны(или несколько). Для удешевления попробуй разместить все с одной стороны, не выйдет, группируй компоненты по размерам, мелочь внизу, крупные компоненты вверху.
По проекту: Рассмотри возможность коммуникации и взаимодействия между одинаковыми спутниками, все равно лору используешь. Что-то типа сети обмена данных. Это увеличит надежность всей системы. По железу: учти интервал рабочих температур. Думаю стоит добавить батарею(разрешенную для использования в космосе), зарядку для батареи, и нагревательный элемент.
Последнее. Устройство для работы в условиях сильного ионизирующего излучения, изучи вопрос по защите и не поленись добавить это все в следующую версию
[Автор]
Сколько минут/секунд проработает радиоционно незащищённый мк?
А какие обстоят дела с микроклиматом на борту, как охлаждать или подогревать бедете (газпром и там трубу подведет..)?
В косТмосе не любой акуммулятор или солнечьная батарея работать будут!
[Автор]
[Автор]
Для меня это первый опыт разработки платы такого масштаба.
Оставлю в стороне основной функционал платы, остановлюсь на радиомодуле. Я неплохо соображаю в этом, так как это часть моей работы. Я строю коммерческие проекты на сетях lorawan в крупной телеком-компании.
Выбранный модуль использует модуляции lora, что влечёт за собой следующие возможные ограничения:
1. Со стороны приёмника должен быть такой же или аналогичный модуль с контроллером, программу для которого также придётся писать. Либо, нужно разворачивать gateway lorawan, и прописывать стек lorawan во встроенной ПО платы.
2. Заявленная дальность 10 км не константа. На практике мне удавалось достичь 36 км, а коллегам 44, но при этом нужно понимать, что со стороны конечного устройства стояла антенна 7dBi высотой почти метр, а со стороны базовой станции 9 dBi высотой почти полтора метра. Есть и обратные примеры, когда связь между БС и конечным устройством обрывалась на 1 км из-за использования неэффективных и неверно установленных антенн.
3. Скорость передачи данных варьируется от нужной дальности. Это особенность модуляции lora, если не вдаваться в подробности. Если на максимальной скорости (около 5 кбит/с) время передачи одного пакета составит около 60мс, то на минимальной (290 бит/с) около 1,5 секунд. Максимальная достигнутая дальность на максимальной скорости (SF7) - 16 км, с использованием вышеупомянутых антенн. Минимальная скорость (или максимальный spread factor - SF12) позволяет передавать данные на гораздо большие расстояния.
В общем, уделите особое внимание антеннам.
4. Вытекает из 3-го пункта. Ввиду большой возможной задержки передачи данных, сложно будет реализовать адекватное удалённое управление спутником (если, конечно, это планируется) в реальном времени.
[Автор]