








На форуме достаточно часто встречаются вопросы по реализации Широтно Импульсной Модуляции на микроконтроллерных устройствах. Я и сам очень много спрашивал по этому поводу и, разобравшись, решил облегчить труд новичкам в этой области, так как информации в сети много и рассчитана она на разработчиков разного уровня, а сам я только- только в нем разобрался и память ещё свежа.
Так как для меня самым важным было применение ШИМ именно для управления яркостью светодиодов, то именно их я и буду использовать в примерах. В качестве микроконтроллера будем использовать горячо любимый ATmega8.
Для начала вспомним, что такое ШИМ. ШИМ сигнал - это импульсный сигнал определенной частоты и скважности:
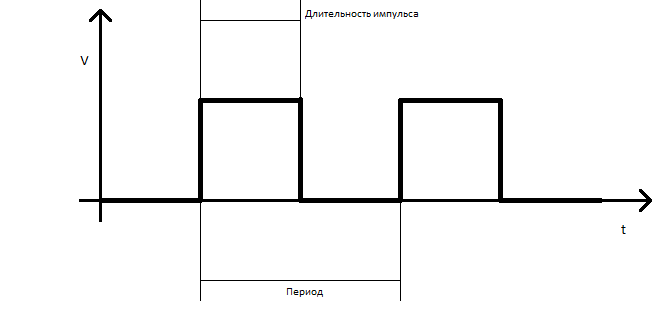
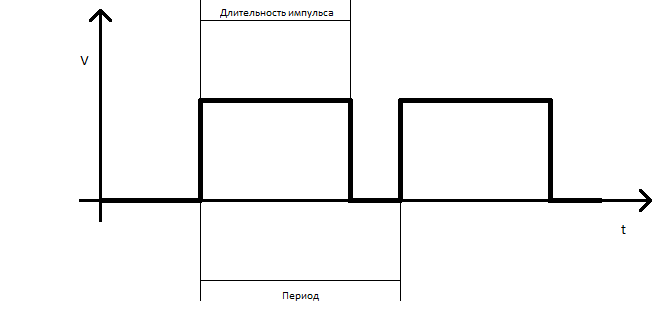
Частота, это количество периодов за одну секунду. Скважность- отношение длительности импульса к длительности периода. Можно изменять и то и другое, но для управления светодиодами достаточно управлять скважностью. На картинке выше мы видим ШИМ сигнал со скважностью 50 %, так как длительность импульса (ширина импульса) ровно половина от периода. Соответственно светодиод будет ровно половину времени во включенном состоянии и половину в выключенном. Частота ШИМ очень большая и глаз не заметит мерцания светодиода из за инерционности нашего зрения, поэтому нам будет казаться, что светодиод светится на половину яркости. Если мы изменим скважность на 75%, то яркость светодиода будет на 3 четверти от полной, а график будет выглядеть так:
Получается, что мы можем регулировать яркость светодиода от 0 до 100 %. А теперь поговорим о таком параметре ШИМ, как разрешение. Разрешение- это количество градаций (шагов) регулировки скважности, мы будем рассматривать разрешение в 256 шагов.
С параметрами вроде разобрались, теперь поговорим о том, как нам получить этот самый ШИМ от микроконтроллера. Берем остро заточенный разогретый паяльник и начинаем пытать МК, одновременно подцепившись к двум его ногам осциллографом и проверяя наличие на них сигнала нужной нам скважности. В микроконтроллерах есть аппаратная поддержка ШИМ и несколько каналов для него, в нашем случае 3. За выдачу ШИМ отвечают определенные выводы МК, в нашем случае OC2, OC1A, OC1B (15,16,17 нога в DIP корпусе). Так же для этого используются таймеры микроконтроллера, в нашем случае TC1, TC2. Так как же сконфигурировать МК для выдачи сигнала необходимой скважности? Все очень просто, для начала сконфигурируем нужные нам ноги на выход:
PORTB=0x00; DDRB=0x0E; // 0b00001110
Далее начнем конфигурировать таймеры. Для таймера TC1 нам потребуются два регистра: TCCR1A и TCCR1B. Открываем даташит и читаем как настраиваются эти регистры. Я настроил его на 8 битный сигнал ШИМ, что соответствует разрешению в 256 шагов:
TCCR1A=0xA1; TCCR1B=0x09;
Для таймера TC2 мы будем использовать регистр TCCR2=0x69;. Его настройка выглядит так:
TCCR2=0x69;
Всё, таймеры сконфигурированы. Скважность будем задавать регистрами OCR1A,OCR1B, OCR2:
Зададим требуемые скважности:
OCR1A=0x32; //50 шагов OCR1B=0x6A; //106 шагов OCR2=0xF0; //240 шагов
Ну и поместим инкремент и декремент этих регистров в бесконечный цикл:
While(1)
{
OCR1A++;
OCR1B--;
OCR2++;
delay_ms(50);
}
Первая тестовая программа готова и выглядит для CVAVR она так:
#include "mega8.h"
#include "delay.h"
void main(void)
{
PORTB=0x00;
DDRB=0x0E; // 0b00001110
TCCR1A=0xA1;
TCCR1B=0x09;
TCCR2=0x69;
OCR1A=0x32; //50 шагов
OCR1B=0x6A; //106 шагов
OCR2=0xF0; //240 шагов
while (1)
{
OCR1A++;
OCR1B--;
OCR2++;
delay_ms(50);
};
}
Компилируем и пробуем в протеусе:
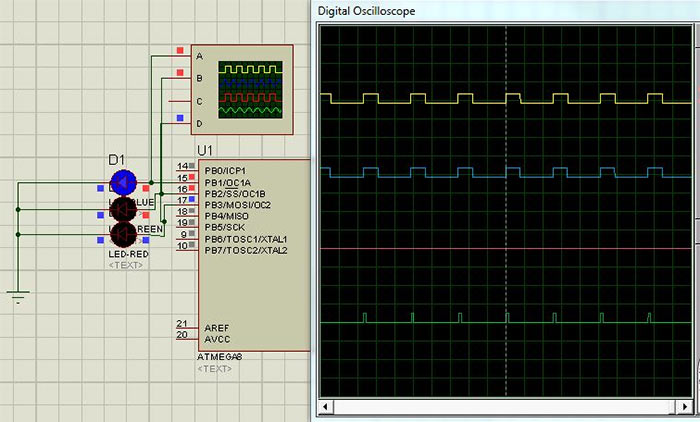
Как видим, программа полностью работоспособна и выполняет возложенные на нее задачи, ничего сложного в ней нет.
В следующей статье рассмотрим программный ШИМ, который необходим в случае если число аппаратных нам недостаточно или в силу других причин.
- pwm at8.zip (15 Кб)

 Опубликована: 04.08.2013
Опубликована: 04.08.2013
 Изменена: 08.08.2013
Изменена: 08.08.2013


 Вознаградить
Вознаградить



Комментарии (12) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
Перепутаны такие фундаментальные понятия как:
1. Полупериод.
2. Период.
3. Частота.
4. Скважность.
5. Коэффициент заполнения.
[Автор]
[Автор]
2. Период это время одного полного колебания. То есть, на рисунках нужно слово "частота" заменить на "период". Период это обратная величина от частоты.
3. Слово "скважность" нужно заменить на "длительность импульса". Скважность это отношение интервала между импульсами к длительности самого импульса.
4. Коэффициент заполнения это отношение длительности импульса к периоду его повторения.
5. Период состоит из двух полу периодов: длительность импульса + интервал между импульсами.
Правьте текст и срочно!
[Автор]
OCR1A=0x32; //50 шагов
Перевидите 32 в десятичную систему, то получите число 50
[Автор]