








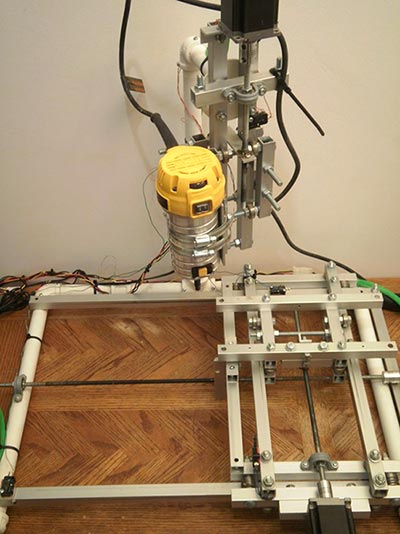
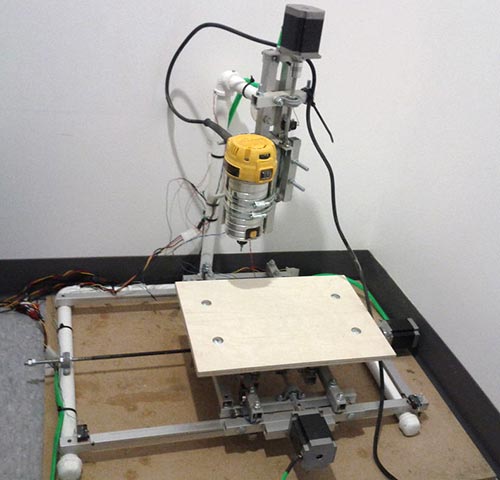
Я построил этот ЧПУ с нуля, используя в основном алюминиевый профиль 3/4" x 3/4" x1/16" квадратного сечения. Я разработал станок, ориентируясь на проекты, найденные в Google и импровизируя.
Рабочая площадь станка составляет около 12" x 8" x 3" (X/Y/Z).
При сборке шасси с подшипниками использовано более 100 5/16" гаек.
Я подсчитал, что проект обойдется примерно в $650 - $700.
Примечание: Я сделал этот проект, используя только перфоратор (с возможностью работы в режиме дрели), ножовку и лобзик. У меня нет сверлильного станка и торцовочной пилы, чтобы делать отверстия/разрезы. Конечно, при наличии соответствующего оборудования и инструмента, всё это делается намного быстрее и проще.
В статье подробно рассказано об используемых элементах. Если много людей захотят повторить проект, то я разработаю чертежи. Но сейчас эта статья просто дает представление о самостоятельной постройке ЧПУ.
Фрезер
В качестве фрезера я выбрал ручной фрезер DeWalt DWP 611. Он имеет переменную скорость и мощность до 1,25 л.с. Сначала я хотел использовать Dremel, но беспокоился о питании.
Доступный мне в то время фрезер я получил установленным в корпус.

Главная рама
Идея рамы взята у Tom McWire. Я немного масштабировал её.
Трубы - это оцинкованные стальные трубы 3/4". Я окрасил их белым матовым цветом для более красивого вида и остался доволен результатом.
Длина трубы не так важна, оси могут выходить за её пределы.
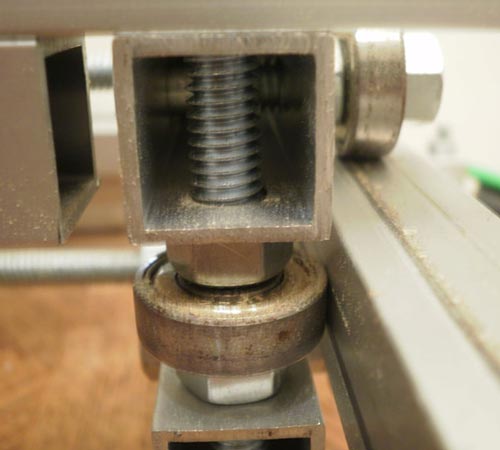
Подшипники
Я использовал подшипники с внутренним диаметром 8 мм, наружным 22 мм, и толщиной 7 мм.
Обратите внимание, что внутренний диаметр 8 мм, что немного больше чем 5/16". Когда подшипники будут закреплены на направляющих, это будет компенсировано туго затянутыми гайками (т.е. подшипник будет прикреплен так, как будто использовался болт М8).
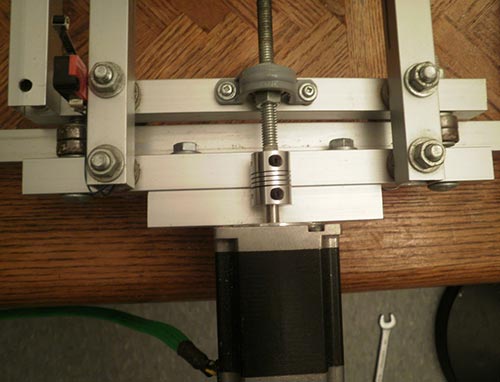
Муфты
Я купил муфты из Гонконга на eBay по $4 штука. На одной стороне муфты есть отверстие 1/4"(6,35 мм) для шагового двигателя, а на другой 8мм для ходового винта.

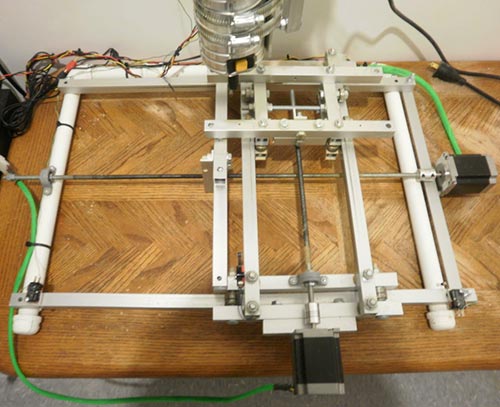
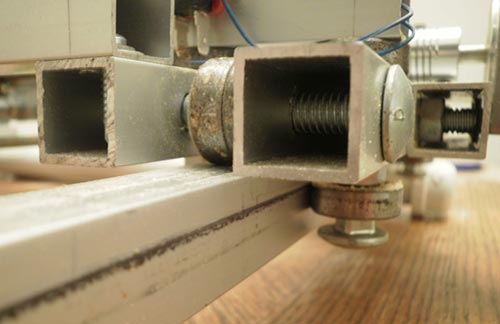
Ось X
Длина направляющих X около 26", а расположены они на расстоянии 15" если считать по внутренним сторонам.
Может показаться, что вся "каретка" удерживается только силой тяжести, но на самом деле подшипники прижимаются к раме довольно плотно
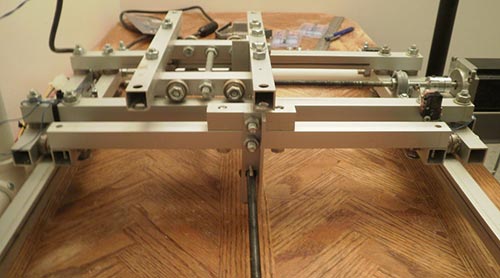
Оси Х и Y собираются вместе как одна часть.
Направляющие Y на самом деле помогают четырем блокам подшипников X (я использую слово блоки из-за отсутствия более подходящего слова) оставаться напротив друг друга.
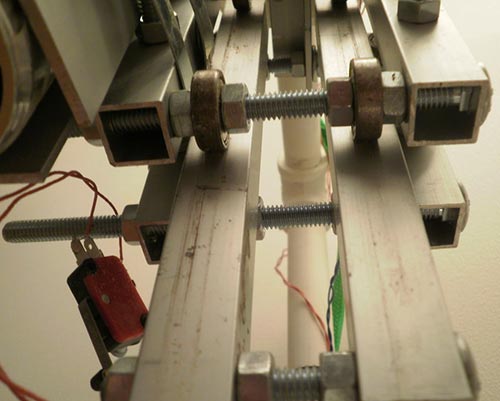
Ось Y
Сборки подшипников Y повернуты боком по отношению к оси X. Во первых, я пытался сориентировать их так же, как ось X, но главной проблемой была необходимая длина алюминиевых блоков. Я решил использовать максимально длинную ось Y, за вычетом расстояния, на которое может двигаться рабочая платформа. Преимущества такой конструкции я опишу позже.

6" болты с квадратным подголовком, которые используются в подшипниковых сборках, заставляют двигаться их по направляющим оси Y.

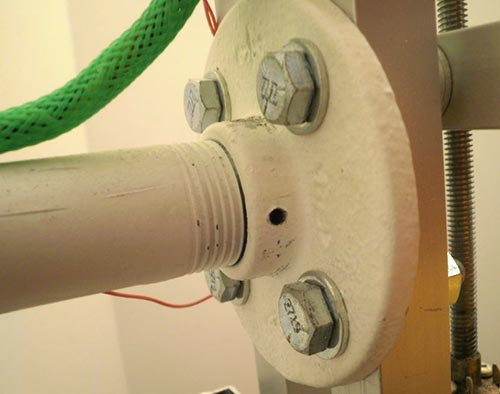
Ось Z
Сборки подшипников оси Z делаются так же, как для оси Y, но вся ось располагается вертикально.
Я использовал восемь 6" болтов с квадратным подголовком для сборки подшипников. Это упрочняет сборку.
Направляющие Z оси крепятся непосредственно к трубе 3/4"(главной раме).

Ходовые гайки
Ходовые гайки (винтовой передачи) изготовлены из 5/16" Т-образных гаек с отверстиями. Т-образная гайка крепится на алюминиевой основе 1/8" х 0,75". Потом она крепится к сборкам подшипников.
С Т-образными гайками люфт очень мал, и у меня нет кругового индикатора, чтобы измерять его.

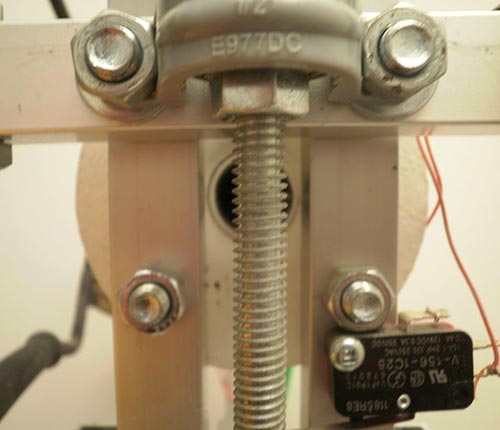
Ходовые винты и винтовые опоры
Ходовые винты это дешевые 5/16" штифты из оцинкованной стали.
Винтовые опоры очень важны. Муфты по существу выглядят как пружины, что допускает перекос винта, который не желателен для любой из осей из-за непредсказуемых игр. При установке винтовых опор, абсолютно ни что не играет. Крутящий момент двигателя должен быть передан непосредственно на ходовую гайку.

Подшипники крепятся с обеих сторон для ходовых винтов. Подшипники крепятся к раме при помощи 1/2"зажимов для труб, которые после небольшой шлифовки отлично подходят для них.

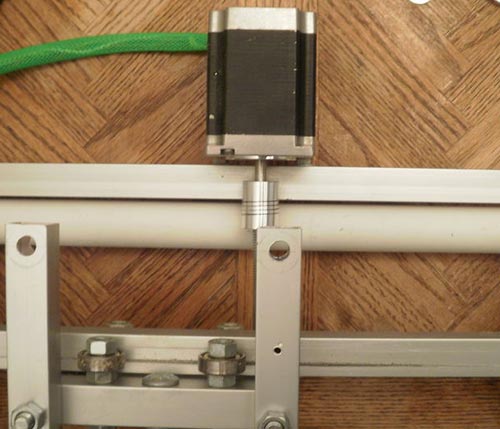
Установка моторов
См. фото:
Рабочая платформа
Рабочая платформа сделана из русской березовой фанеры. Это самая высококачественная древесина, которую я нашел в местном хозяйственном магазине. Она обошлась мне в 20$ за лист 2'х4'. Толщина составляет 11,5 мм.

Как я уже говорил ранее, рабочая зона составляет около 12"х 8"х3". Тем не менее, я вырезал платформу размером 14" х 10", для того, чтобы использовать зажимы. Вот то преимущество, о котором я говорил выше: можно менять размер рабочей платформы.
Я специально использовал болты длиннее, чем надо, чтобы можно было расположить стол под прямым углом к фрезеру.

Концевики
Концевики - это прекрасная вещь в ЧПУ. Во время тестирования без выключателей, я поднялся по Z оси слишком высоко и чуть не оставил без коммуникаций ось Z. Провода смогли растянуться, но это не хорошо.
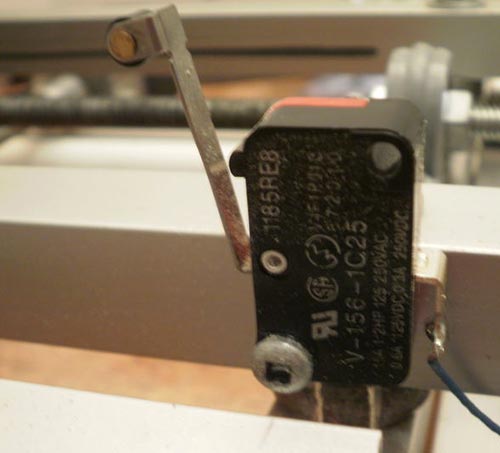
Я установил концевые выключатели на каждый конец X и Y осей и один в верхней части оси Z.
Если хоть одна из кнопок нажимается, станок останавливается.

Прокладка кабелей
Проводов много, и важно, чтобы они не мешали. Провода шаговых двигателей очень короткие, поэтому я удлинил их проводами от старого компьютерного блока питания. Я также поместил провода в рукава предназначенные для моддинга компьютера. Они сдерживают их, и смотрится красиво и аккуратно. Также я использовал кабельные стяжки, чтобы прикрепить провода к раме.
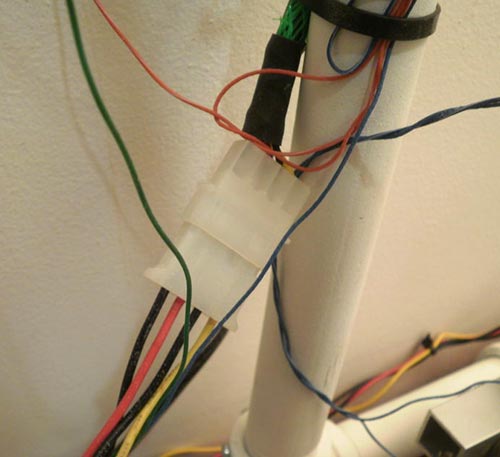
Я использовал Molex разъемы, поэтому я могу легко отключить станок от драйвера в случае необходимости. Алюминиевый профиль позволяет мне спрятать провода от механический воздействий.

Плата драйвера
Я использовал дешевую плату драйвера двигателя Toshiba TB6560 купленную на eBay. На самом деле мне пришлось использовать три контроллера Toshiba TB6560. Один был неисправен изначально, ещё один сломался после использования и один сгорел. Их легко менять если вы умеете паять. Замена занимает совсем немного времени, но я предлагаю покупать более качественные драйверы.
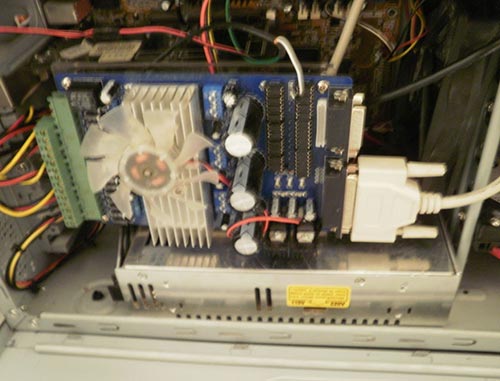
Я установил плату драйвера и блок питания в корпус своего компьютера. Плата драйвера установлена на акриловую основу и установлена на слоты расширения. Я заменил штатный кулер на плате, на кулер от старой видеокарты.
Извините за размытые фотографии.
Драйверы управляются при помощи LPT порта от компьютера. В качестве софта использовал MeshCAM 5 для генерации G-кодов и MACH 3.
 none
none
 Опубликована: 2012 г.
Опубликована: 2012 г.


 Вознаградить
Вознаградить



Комментарии (3) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация