








С момента публикации первой версии намоточного станка на Arduino прошло уже больше года. С тех пор я переосмыслил некоторые важные моменты по механике, электронике и программе управления, и в данной статье расскажу о реализации обновления 2.0. По базовой конструкции и электросхеме обе версии весьма схожи и, чтобы не повторяться, я буду делать отсылки к первой статье и рекомендую уважаемому читателю ознакомиться с ней перед прочтением данной.
В ходе обсуждения на форуме и работы со станком одной из главных проблем был выявлен "дерганый" режим автонамотки, когда основному двигателю приходилось останавливаться во время работы укладчика, что приводило к рывкам проволоки и расшатыванию всей конструкции. В дополнение к предыдущему отсутствовал разгон основного двигателя, что еще больше усугубляло ситуацию. Второй проблемой являлся крайне неудобный способ установки и снятия оправки, на которую производиться намотка. Для этого необходимо было разобрать всю намоточную ось, что крайне затрудняло работу.
Итак, обо всем по порядку. Программа работы обоих шаговых двигателей теперь организована в одном прерывании, что позволило "рулить" ими одновременно. При этом для лучшей плотности витков двигатель укладчика делает перемещение в конце цикла витка, что позволяет поджимать новый виток к предыдущему. Плюсом к этому, основной двигатель выходит на заданную скорость с ускорением, а если точнее, то начинает движение с некоторой скоростью Vo≈4 об/мин и разгоняется за оборот до заданной. Это уменьшает рывок проволоки в начале намотки. Параметр меню "Speed" теперь устанавливает скорость в оборотах в минуту, программный предел 300 об/мин, хотя я не тестировал при реальной намотке скорости даже близкие к предельной, т.к. для этого необходимо исключить все или почти все пластмассовые детали из механики. В меню автонамотки добавлен параметр Direction, который назначает начальное направление укладчика.
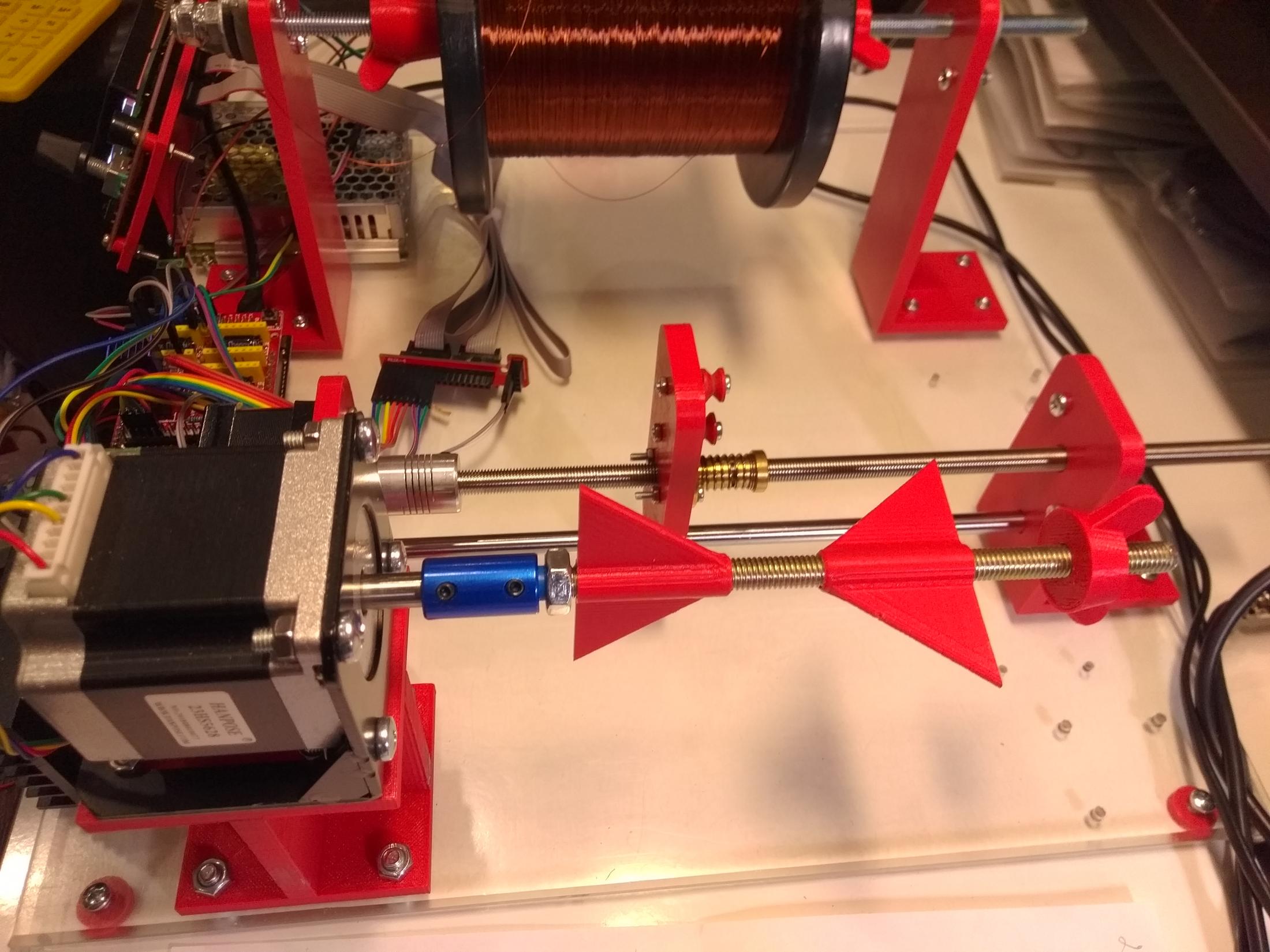
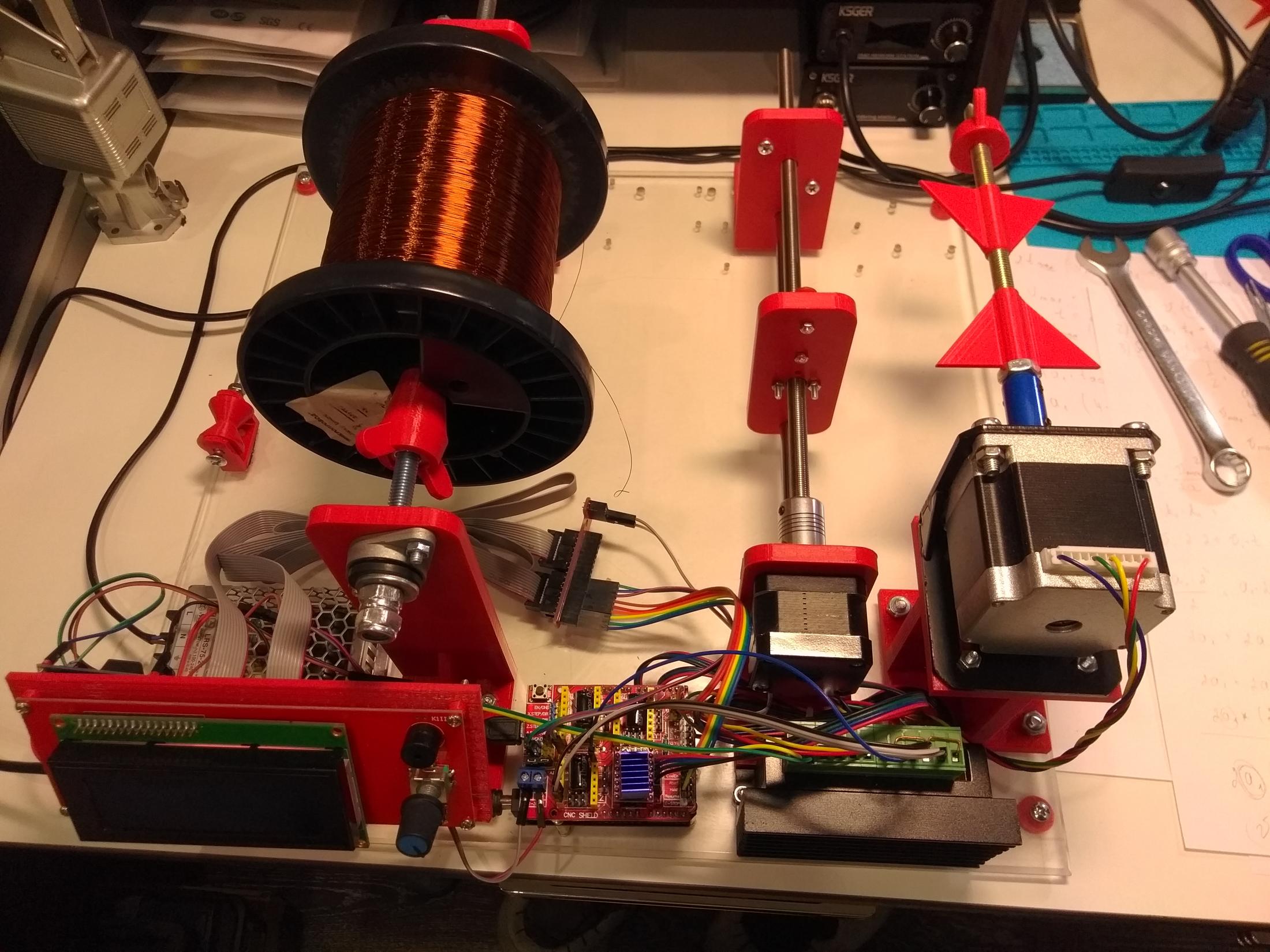
Это было трудным решением, но упразднена вторая опора под ось оправки, что позволяет теперь ставить и снимать ее гораздо удобнее. Шпильку М8 держит на оси двигателя жесткая муфта, но автор оставляет за читателем право заменить это, не вполне надежное соединение, на цанговый патрон. Так же стоит отметить, что многое зависит от жесткости опоры двигателя 23HS5628 и, весьма вероятно, что ее нужно заменить на более крепкий вариант. В файлах проекта есть два варианта 3D печати этой опоры, предлагаю самостоятельно оценить их прочностные характеристики или изготовить опору самостоятельно. Укладчик теперь - это резьбовой вал М8 с шагом 1мм, по которому ходит гайка "анти-люфт", и обычный вал ø8. Все STL модели приложены внизу статьи, диаметры отверстий даны преимущественно под рассверловку. Шаг резьбы укладчика можно изменить в коде:
#define ShaftStep 50 // ShaftStep = Шаг резьбы*50
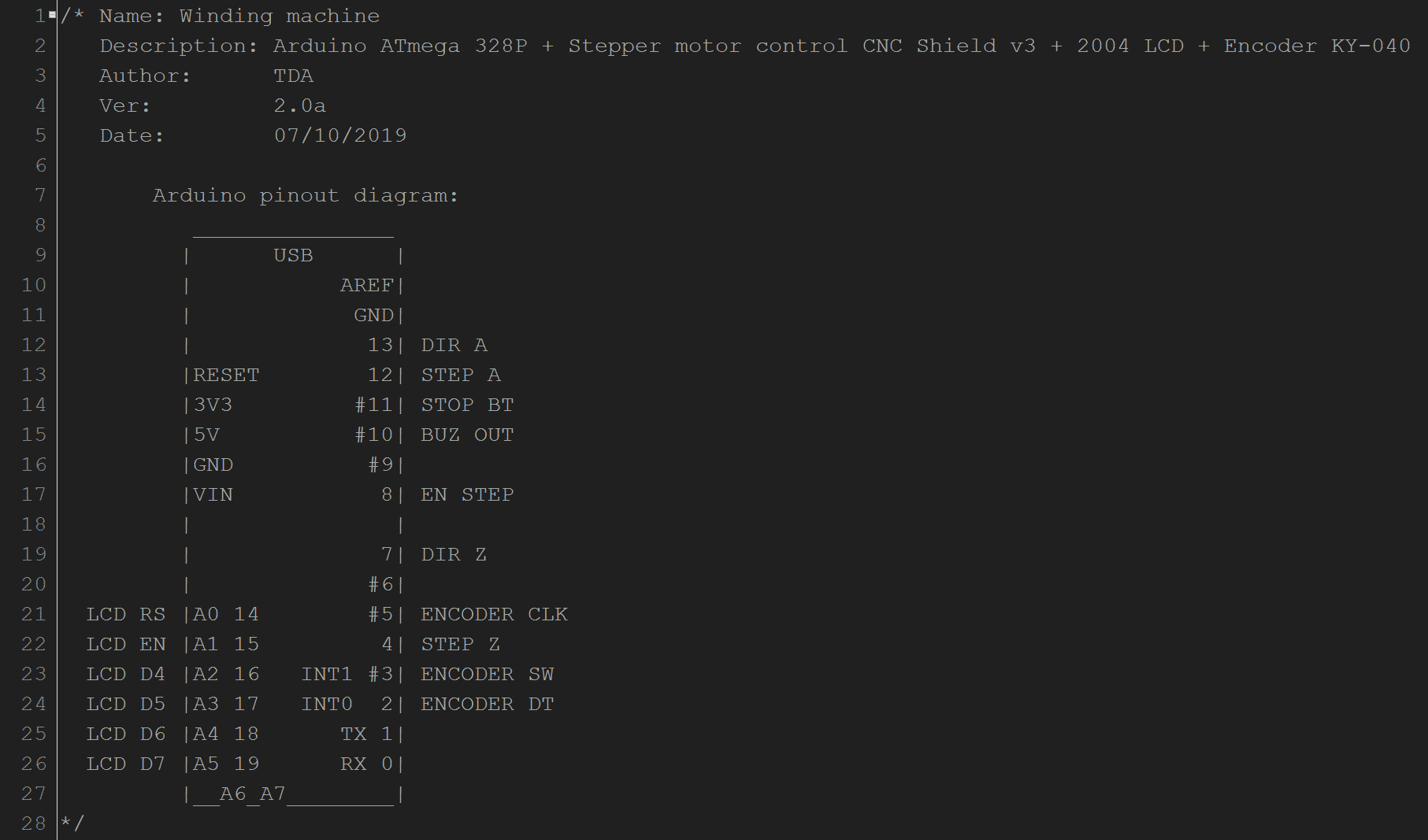
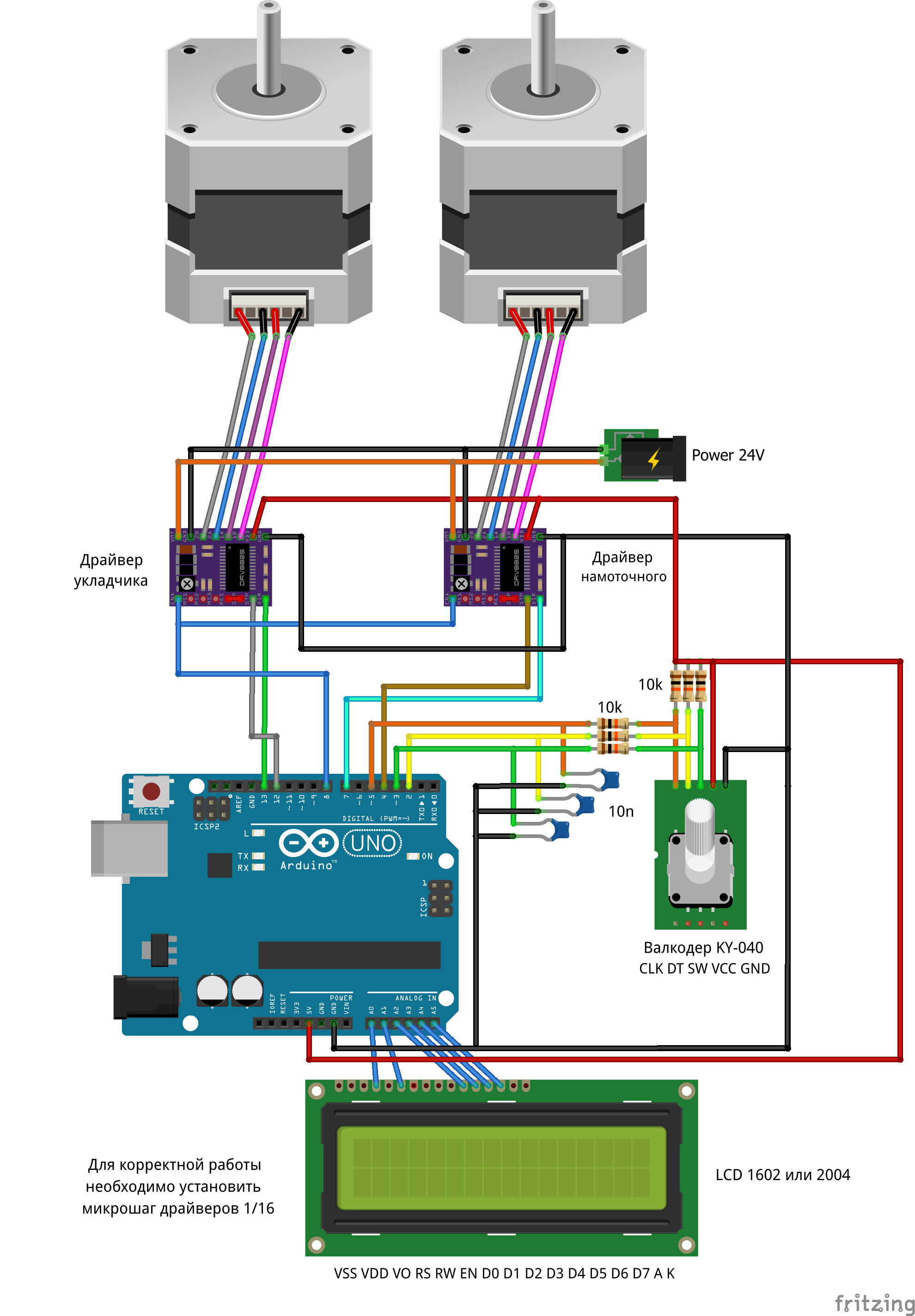
В связи с применением ШД 23HS5628 питание теперь обеспечивает БП LRS-75-24 с выходным 24 Вольта, драйвер для большого двигателя теперь TB6600, а для маленького оставлен прежний DRV8825. Про установку тока на DRV8825 читай предыдущую статью. Управляющие выводы микроконтроллера для драйверов остались неизменны. Если установлен CNC Shield, то это будут ось "A" для укладчика и ось "Z" для намоточного двигателя. Подшипники KP08 заменены на KFL08, но это уже частности и оба варианта вполне работоспособны.
Еще стоит сказать о натяжителе проволоки. Отдельного конструктива под него нет, автор реализовал его парой резиновых шайб и гаек, которые поджимаются к подшипнику катушки и тем создают трение. Работоспособно, но не идеально, надеюсь с вашей помощью найду лучшее решение.
Еще немного по программе:
Протокол обмена данными LCD с последовательного I2C заменен на параллельный полубайтовый (см. схему), он быстрее и, при наличии свободных ног, я не нашел причины ужиматься. Хотя на данный момент программа использует 2 строки и 16 символов (1602 LCD), но я к своей версии уже подключил LCD 2004 в сборке с энкодером и бузером что является заделом на будущее. Вернуть к варианту 1602 I2C в текущей версии ПО все еще возможно, раскомментировав нужные строчки:
#include <LiquidCrystal.h> //#include <LiquidCrystal_I2C.h> //#include <Wire.h>
LiquidCrystal lcd(RS,EN,D4,D5,D6,D7); // Назначаем пины для управления LCD //LiquidCrystal_I2C lcd(0x27,16,2); // 0x3F I2C адрес для PCF8574AT, дисплей 16 символов 2 строки
lcd.begin(20,4); // Инициализация LCD Дисплей 20 символов 4 строки // lcd.begin(16,2); // Инициализация LCD Дисплей 16 символов 2 строки
В дальнейшем я все таки перейду на 4 строки и поддержку 2 строчных дисплеев обещать не могу. Версия программы 2.0 является "альфой" и я думаю в теме для обсуждения статьи мы с вами быстро поправим баги.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Плата Arduino | Arduino Uno | 1 | Поиск в магазине Отрон | ||||
| Плата расширения Arduino | CNC Shield v3.0 | 1 | Поиск в магазине Отрон | ||||
| Драйвер ШД | DRV8825 | 1 | Поиск в магазине Отрон | ||||
| Драйвер ШД | TB6600 | 1 | Поиск в магазине Отрон | ||||
| Модуль поворотного энкодера | KY-040 | 1 | Поиск в магазине Отрон | ||||
| Шаговый двигатель | 17HS3401 | 1 | Поиск в магазине Отрон | ||||
| Шаговый двигатель | 23HS5628 | 1 | Поиск в магазине Отрон | ||||
| LCD Дисплей | HD44780 2004 | 1 | HD44780 1602 | Поиск в магазине Отрон | |||
| Конденсатор | 10 нФ | 3 | Поиск в магазине Отрон | ||||
| Резистор | 10 кОм | 6 | Поиск в магазине Отрон | ||||
Скачать список элементов (PDF)
Прикрепленные файлы:
- Winding_2_0a.rar (1234 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить




Комментарии (60) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
В целом станок огонь.
[Автор]
Может на видео не так заметно, но не увидел я на видео движение укладчика которое поджимает проволоку в конце витка. Может движение столь малое что на видео его и не видно.
Размазывать движение укладчика на виток не стоит, его стоит размазывать на весь слой. Это придаст скорости намотки, но, как мы уже выяснили, необходимо усилить главный вал.
[Автор]
Проблема только в муфте и жесткости опоры. Есть более подходящие типы муфт или можно использовать цанговый патрон.
Перемещение укладчика осуществляются в конце каждого витка.
Именно размазывать на весь слой у меня желания и не было.
Это не промышленный станок так что скорость вторична. Для меня 50об/мин вполне достаточно. Обычно слой не больше 100 витков, а потом все равно в ручную изоляцию укладывать.
Две опоры уже были в первой версии, посмотрите этапы разработки и мысли в слух:
Версия 1.0 https://youtu.be/IenFIIMIbyk
Версия 2.0 ч1 https://youtu.be/fHNrOkgSCnA
Версия 2.0 ч2 https://youtu.be/P0zg57S8kEY
Версия 2.0 ч3 https://youtu.be/o_f3Sf8Vp78
Там можно витки и размазывать и тормозить/двигать после каждого. В общем система гибкая получается, но не совсем автономная как в вашем случае.
[Автор]
Что бы сматывать нужен ещё один ШД на оси подающей катушки, это в планах, причем его же использовать в качестве управляемого натяжителя.
[Автор]
[Автор]
[Автор]
Справедливости ради, меню на 4 строки не разворачивается и должно работать на 20x4 так же как и на 16x2.
[Автор]
[Автор]
[Автор]
По мех. части, думаю, только небольшие изменения.
[Автор]
[Автор]
"Публикатор 27.10.2019 19:34 #
На форуме автоматически создана тема для обсуждения статьи."
Нажмите на ссылку "тема для обсуждения статьи"
У вас в видео была озвучена, что у вас нет решения как организовать натяжку проволоки.
Есть хорошее решение от японцев. Правда оно сложное. Катушка с источником проволоки крепится на ещё один приводной вал. Двигатель управляется совершенно независимой системой. проволока проходит через под пружинный ролик , который соединен с переменным сопротивлением или бесконтактным энкодером - при натяжке проволоки ролик изменяет своё положение и меняет значение сопротивления - а сопротивление меняет скорость с какой двигатель разматывает катушку - такая механическая обратная связь. Остановилась намотка останавливается и размотка. Если поискать -есть ролики на ю-тубе.
И второе - нельзя ли из меню выставлять количество шагов на оба двигателя? Или вынести переменные шагов в начало программы, чтоб не искать в программе где менять шаги. Хочу для двигателя катушки использовать редукторный привод, для витков у меня тоже другой шаг.
[Автор]
Интересное решение по натяжке, посмотрю.
Сейчас у меня сделано так: кружок из войлока притирается к резиновой прокладке на оси катушки, и поджимается самоконтрящейся гайкой. Это видно на видео https://youtu.be/o_f3Sf8Vp78
В принципе это работает неплохо.
Хорошие решения по натяжке описаны здесь: https://www.kit-e.ru/preview/pre_2014_12_106_BrS_practice.php
Планировал попробовать с торможением, управляя током ШД. Можно сделать релейное переключение режима работы этого ШД, что бы он мог еще и сматывать назад при необходимости.
Можно вынести, сейчас немного занят другим проектом, но как освобожусь буду писать очередное обновление прошивки.
Пишите свои предложения и замечания к программе на форуме в теме для обсуждения статьи.
https://3dtoday.ru/blogs/lenivo/stanok-dlya-namotki-transformatorov-detali-napechatany-plastikom-solidfilament-ot-magazina-top-3d-shop/#formComment
Тем более на тестирование мне целая катушка пластика бесплатно неожиданно приехала. Поэтому там и разместил.
Большое спасибо. Сделал редукторный намотчик на движке 7,5 градусов с от лазерного принтера с редукцией 9,5 . Зато провод 1,2 мм намотал.... только блок питания надо мощней - с двумя двигателями больше 0,8мм не тянет напряжение просаживается сильно и арудино слетает.
[Автор]
RepRapDiscount Full Graphic Smart Controller - это графический дисплей 12864 (на чипе ST7920, использую библиотеку: U8glib), энкодер и слот SD карты. Если кто-то использовал такой - помогите.
И по поводу винта укладчика
.. Что означает цифра 50? В дэфайнах? (как мне видится 16(микрошаг)*1(шаг винта) *200 шагов мотора) 3200? А у вас 50????
И если применить редукцию в главном движке, где поправить кол-во шагов на оборот? Микро шаг *200 * на "шаг редукции"?
Это что - крутящий момент?
Где бы я не разобрал катушку с контактора, почти везде заводы выполняют работу по намотке очень халтурно. Приходится на простых станочках выполнять намотку, пропитку, и пайку выводов. А здесь у автора укладочка, натяжитель честь по чести. Лёгкие доработки и усиление элементов это уже сущие мелочи. Уважение и благодарность за мастерство Автору!!!
(как сделано в промышленном станке)- сберечь тонкий провод от растяжения. Стабилизация натяжения - муфтами, а слежение за
рычагами - оптопарами. Схожий механизм был в катушечных магнитофонах в моделях, начиная с 1 класса. Помните, под катушками были малозаметные качающиеся штыри? Еще, помню, в промышленном станке была приспособа для намотки типа"универсаль". И в станке можно то ли дополнительную качалку установить, то ли ШД шага рулить. И поджимной ролик, которого СЕЙЧАС нет, будет полезен. Вот вручную ее мотать никак, а раз уж чпу работает, то, как говорится...И кто раз ее сделает, другим способом уж больше не будет мотать (речь не о
трансформаторах). Да другим и не получится - и бескаркасная, и не разваливается после снятия. Емкость меньше. Сплошные преимущества. А, впрочем, почему не о трансформаторах? И у них
емкость ведь есть. Это дело можно и проверить.
[Автор]
Позвольте пару вопросов:
1. Я обратил внимание? что основной шаговик стоит на кронштейне металлическом покупном, вы на него ссылку еще в видео кажется кидали на али, а в чем проблема просто его напечатать? Неужели жесткости не хватает?
2. Опять же о шаговиках, а собственно основной зачем такой мощный? И драйвер другого типа, неужели нельзя поставить одинаковые шаговики?
Вот например у меня валяется пара 17pm-j204-p3vs, в принципе вроде тоже самое только послабее, неужели не вытянет?
[Автор]
1. Да, жесткости много не бывает, пластик "гуляет".
2. Смотря для какого провода. Если для 1мм то может быть проблема. Крутящий момент ШД резко падает от скорости да и в целом он невелик.
У меня уже имеется сборка на редукторе с двигателем, нет возможности заменить ее на шаговый двигатель. Нужно снимать обороты с оси вращения катушки и соответственно переделать программу под это.
Автор тему забросил?
Интересно изготовить данный станок.