








Собираясь разрабатывать нового робота, я захотел собрать свой модуль, который был бы универсальным для любого пользователя. Нужно было бы лишь подключить двигатели аккумулятор, ардуино и различные датчики , и чтобы все это объединяла всего одна плата
Так же я хотел бы иметь возможность использовать эту плату в своих дальнейших проектах, чтобы я мог управлять двигателями различных типов. Немного поразмыслив я накидал в голове следующие цели:
- Обеспечение питания Arduino (5В)
- Обеспечение питание двигателей (5В и 12В)
- Коммутация выводов I2C , Serial Port
- Управление 4 электродвигателями постоянного тока
- Подключение аналоговых датчиков
И так после этого я стал искать способы решения всех задач , обо всем по порядку:
Обеспечение питания Arduino (5В)
Тут все просто я использую импульсный стабилизатор напряжения L7805 в корпусе D2Pack
Схема включения выглядит следующим образом:
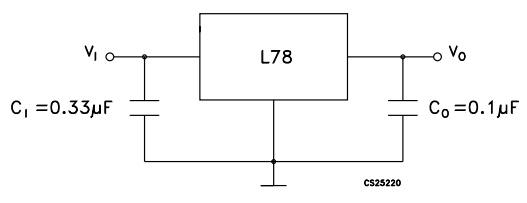
Входные фильтры тут не особо важны, а вот к выходным надо уделить особое внимание, так как если не задействовать в цепи выходные фильтры будет очень много шума от самой микросхемы.
Обеспечение питание двигателей (5В и 12В)
Почему нужно делать два разных вида питания? Все просто- в робототехнике в основном используются два вида электродвигателей с разным питающим напряжением это 5 Вольт и 12 Вольт , если подавать на 5 Вольтовый электродвигатель 12 Вольт он этого не выдержит. От сюда и появилась идея сделать два вида питания , но делать его на 2 микросхемах мне не хотелось и это не выгодно. Поэтому я решил применить микросхему LM2596,которая имеет следующую схему включения: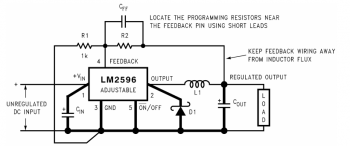
Но я использовал на ней два вида обратной связи (через два разных делителя), поэтому я использовал переключатель , который меняет направления тока в цепи , в результате на выходе мы получаем два разных вида питания.
В каждой цепи присутствует индикатор который показывает какой именно режим сейчас работает.
Коммутация выводов I2C , Serial Port и аналоговых входов
Коммутация осуществляется с помощью создания на плате двух шин , к которым подключены разъемы для более удобной сборки робота.
Каждый аналоговый вход имеет параллельно себе шину питания и заземления , все это сделано чтобы облегчить соединение датчиков с роботом.
Управление электродвигателями
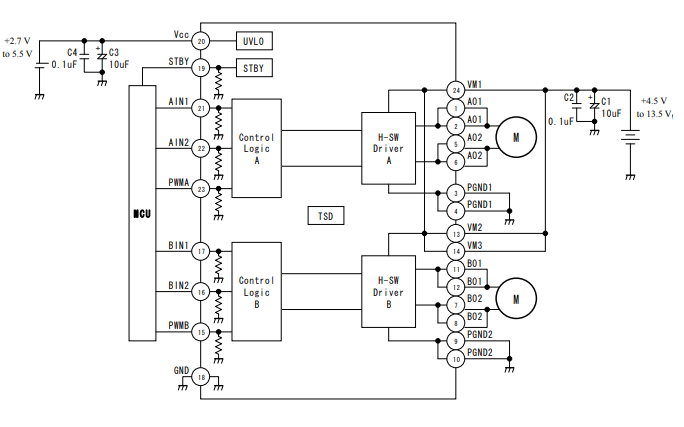
За управление отвечает 2 двухканальных Н-моста TB6612FNG, схема включения каждого из которого следующая:
Весь проект выполнен в Altium Designer 17, принципиальная схема проекта выглядит следующим образом:
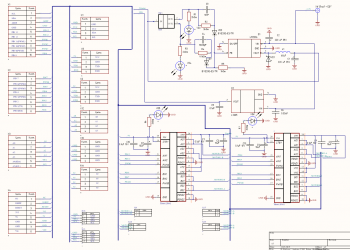
Для удобной проектировки плат очень удобно использовать функцию Bus (шина), такой формат создания проектов позволяет сократить место на чертеже и сделать проект более читабельным.
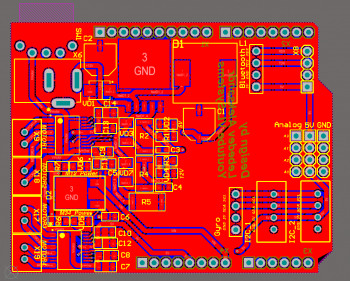
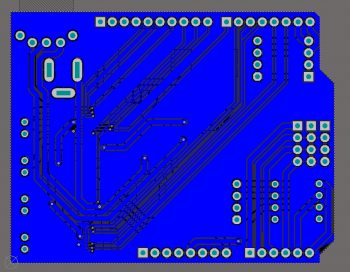
После разводки печатная плата выглядит следующим образом:
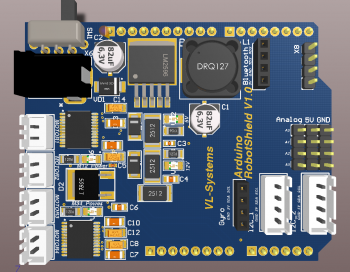
Трехмерную модель можно посмотреть на рисунке ниже
При расстановке компонентов старался выдержать минимально расстояние чтобы сократить место на плате.
И всегда помним , что фильтрующие конденсаторы нужно поставить максимально близко к микросхемам.
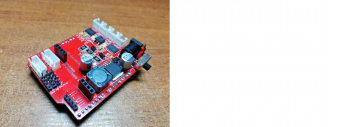
А так выглядит готовая плата:

Остается только установить компоненты и можно пользоваться, после монтажа плата показала себя работоспособной.
Прикрепленные файлы:
- ROBOT_Sheeld.zip (350 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (3) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]