








В данной статье речь пойдет о подключении GPS приемника EB-500 к плате Arduino UNO. Сам приемник прост в подключении и относительно недорог.
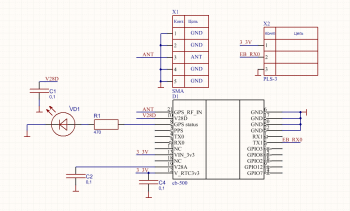
Для подключения мы будем использовать UART, схема подключения показана на рисунке.
Подключение осуществляется по трем проводам:
1) +3.3В - питание модуля;
2) TXD - передача данных от модуля к плате Arduino;
3) GND - "земля", общий провод.
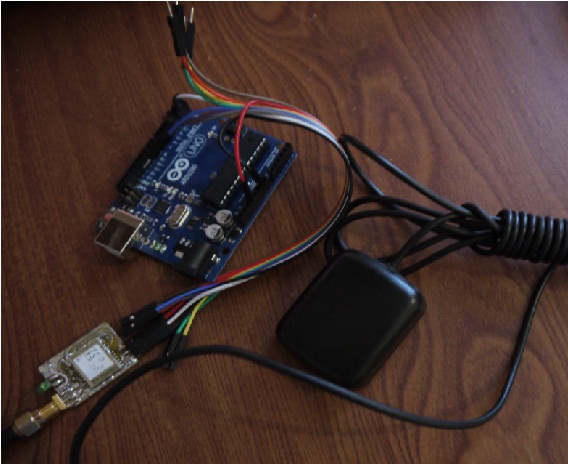
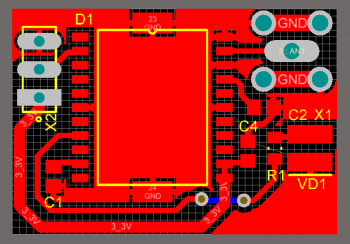
На фото показано собранный макет устройства и модель платы.

TXD (EB_RX0) подключается к Digital2 платы Arduino.
Если подключить TXD подключить к выводу Digital 1 непрошитой платы, то можно увидеть необработанные данные, приходящие от приемника.
Но наша задача состоит в получении уже готовых данных, таких как: долгота/широта, точность, время, дата, скорость, направление движения, высота над уровнем моря. Можно пойти двумя путями получения этих данных: самостоятельно разобрать получаемые строки, но это требует написания своего алгоритма, поэтому не будем изобретать велосипед, и воспользуемся готовой библиотекой TinyGPS. Построим в консоли табличку.
Получаем эту табличку, используя следующий код:
#include "SoftwareSerial.h"
#include "TinyGPS.h"
TinyGPS gps;
SoftwareSerial ssGPS(2, 3);
static void smartdelay(unsigned long ms);
static void print_float(float val, float invalid, int len, int prec);
static void print_int(unsigned long val, unsigned long invalid, int len);
static void print_date(TinyGPS &gps);
static void print_str(const char *str, int len);
void setup()
{
Serial.begin(9600);
/*----------------------------------------------------------*/
//Sats - количество найденных спутников
//HDOP - горизонтальная точность
//Latitude - широта в градусах
//Longitude - долгота в градусах
//Date - дата
//Time - времы UTC(-4 часа от Московского)
//Alt - высота над уровнем моря (в метрах)
//Course - путевой угол (направление скорости) в градусах. Значение 0 - север, 90 — восток, 180 — юг, 270 — запад.
//Speed - скорость(км/ч)
/*----------------------------------------------------------*/
Serial.println("Sats HDOP Latitude Longitude Date Time Alt Course Speed");
Serial.println("------------------------------------------------------------------------");
ssGPS.begin(9600);
}
void loop()
{
float flat, flon;
unsigned long date, time;
print_int(gps.satellites(), TinyGPS::GPS_INVALID_SATELLITES, 5); //Количество спутников
print_int(gps.hdop(), TinyGPS::GPS_INVALID_HDOP, 5); //Горизонтальная точность
gps.f_get_position(&flat, &flon);
print_float(flat, TinyGPS::GPS_INVALID_F_ANGLE, 10, 6); //Широта
print_float(flon, TinyGPS::GPS_INVALID_F_ANGLE, 11, 6); //Долгота
print_date(gps); //Дата/Время по UTC
print_float(gps.f_altitude(), TinyGPS::GPS_INVALID_F_ALTITUDE, 7, 2); //Высота над уровнем моря
print_float(gps.f_course(), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2); //Путевой угол
print_float(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2); //Скорость
Serial.println();
smartdelay(1000);
}
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ssGPS.available())
gps.encode(ssGPS.read());
} while (millis() - start < ms);
}
static void print_float(float val, float invalid, int len, int prec)
{
if (val == invalid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i 0)
sz[len-1] = ' ';
Serial.print(sz);
smartdelay(0);
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("********** ******** ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);
}
smartdelay(0);
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i
Что мы в итоге получаем: при подключении устройства к питанию мы получаем табличку со звездочками:
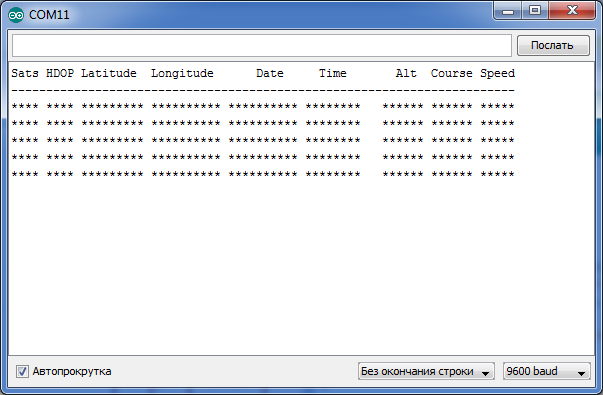
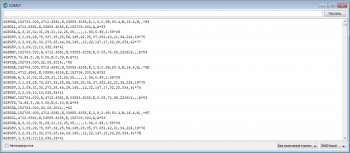
до тех пор, пока не найдутся спутники, и светодиод не начнет мигать, тогда мы увидим следующее:
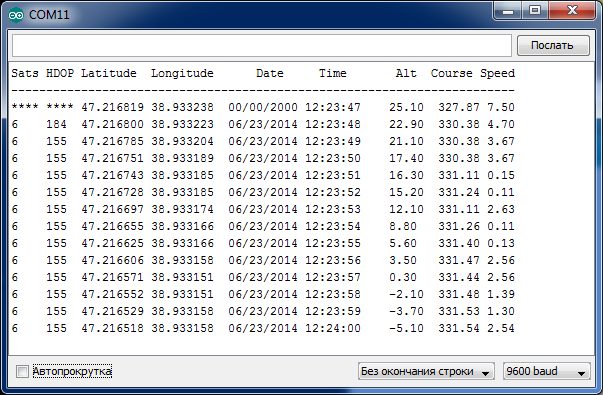
Вот и все. Данные пошли, теперь их можно использовать по своему усмотрению, например подключить дисплей, вывести на него скорость и использовать как спидометр. Или подключить SD-карту и сделать GPS - логгер.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| D1 | GPS приемник | EB-500 | 1 | Поиск в магазине Отрон | ||
| С1, С2, С4 | Конденсатор | 0.1 мкФ | 3 | Поиск в магазине Отрон | ||
| R1 | Резистор | 470 Ом | 1 | Поиск в магазине Отрон | ||
| VD1 | Светодиод | 1 | Поиск в магазине Отрон | |||
| X1 | Разъем | SMA | 1 | Поиск в магазине Отрон | ||
| X2 | Разъем | PLS-3 | 1 | Поиск в магазине Отрон | ||
Скачать список элементов (PDF)
Прикрепленные файлы:
- Arduino_GPS.rar (23 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (2) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]