








Рассмотрим схему простого виброробота который будет запускаться при нажатии на любой инфракрасный пульт управления.
Вибророботы – это класс роботов, передвигающихся за счет механических колебаний двигателя. Чаще всего они имеют миниатюрные размеры, а использование зубных щеток в конструкции обусловлено минимальной силой трения между щетиной и поверхностью.
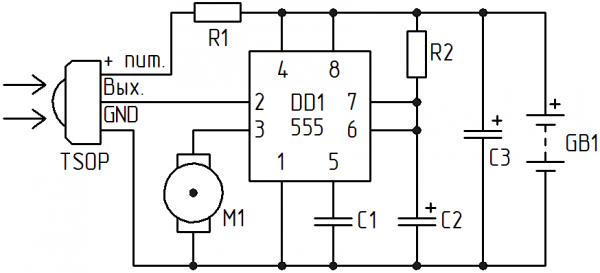
Схема электрическая принципиальная
Схема очень простая и работает таким образом: сигнал от пульта управления поступает на TSOP приемник, на выходе которого формируется отрицательный импульс. Этот импульс запускает таймер (DD1), работающий в моностабильном режиме. На выходе микросхемы (вывод №3) появляется напряжение и включается вибромоторчик М1. Он будет работать на протяжении промежутка времени, длительность которого задается подбором R2, С2. При указанных номиналах вибромоторчик работает 5 секунд. Конденсатор С3 необязателен, но он придаст схеме немного большую стабильность. Рабочая частота приемника должна соответствовать пульту, в большинстве случаев это 36 кГц. Оптимальное напряжение питания от 4 до 6 Вольт.
А здесь изображена схема в более понятном виде, пригодится для начинающих.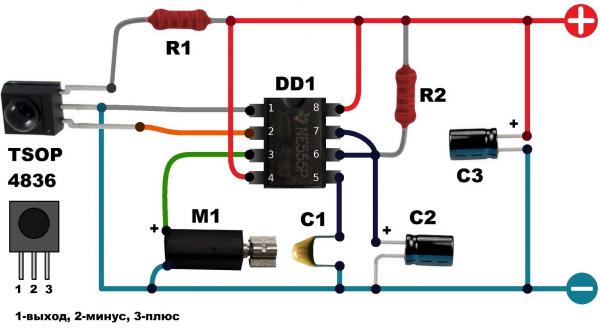
Схема подключения
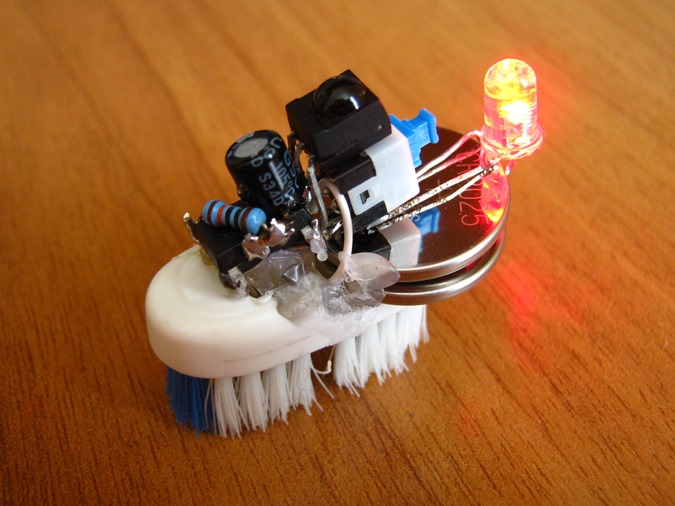
Основой миниатюрного робота является отрезок зубной щетки. Вибромоторчик был взят от старого мобильного телефона. У него имеется эксцентрик на валу и два контакта для питания. Схема выполнена навесным монтажем.
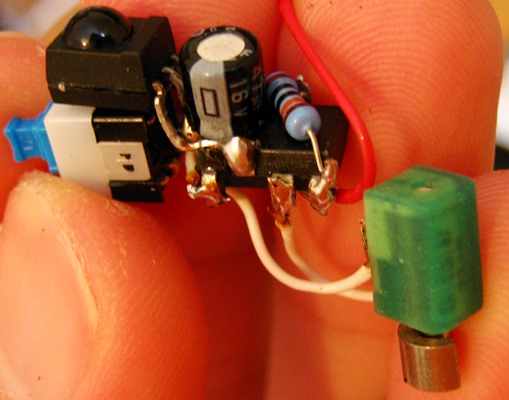
Я отказался не только от конденсатора С3, но и оставил 5-й вывод таймера "в воздухе". Однако, это не желательно, во избежание ложных запусков. На схеме выключатель не указан, его нужно установить в разрыв одного из проводов питания. В ждущем режиме схема имеет потребление 4 мА. После пайки желательно сразу все проверить, возможно вы захотите изменить длительность импульса. Приемник сигнала с маркировкой 4836 является довольно маленьким при этом имеет высокую чувствительность.
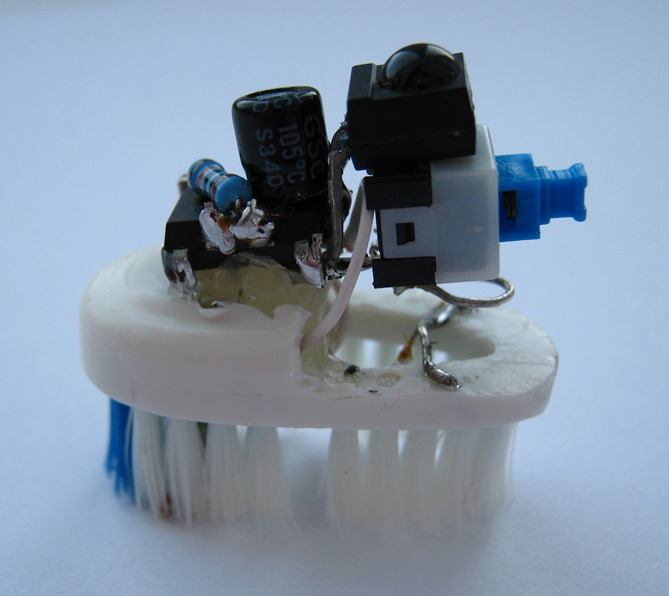
Если все заработало, то устанавливаем все это на щетку.
Контакты для подключения батареек получились плохие, лучше использовать покупной отсек.
Мотор был приклеен на термоклей и размещен в отверстии.
Обратите внимание, что от расположения мотора будет зависеть характер движения робота. Для питании используется две трехвольтовые батарейки CR2025.
При первом включении схема активируется сразу. Избежать этот недостаток, возможно поможет увеличение конденсатора по питанию и введение в схему подтягивающих резисторов.
На разных поверхностях характер движения отличается. В некоторых случаях он вращается вокруг своей оси, и напоминает миниатюрного робота уборщика.
Можно добавить светодиод, так будет еще интереснее.
Первоначальная идея данного виброробота заключалась в том, чтобы разместить его в зоне видимости пульта от телевизора и чтобы он пробуждался на несколько секунд при нажатиях. Таким образом можно разыграть кого-нибудь.

К этой статье есть видеоролик, в котором показана данная конструкция и проведен тест.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| DD1 | Программируемый таймер и осциллятор | NE555 | 1 | Поиск в магазине Отрон | ||
| TSOP | ИК-приемник | TSOP4836 | 1 | Поиск в магазине Отрон | ||
| M1 | Вибромотор | Shicoh B7 7518 | 1 | Поиск в магазине Отрон | ||
| R1 | Резистор | 20 - 100 Ом | 1 | Поиск в магазине Отрон | ||
| R2 | Резистор | 100 кОм | 1 | Поиск в магазине Отрон | ||
| С1 | Конденсатор керамический | 0.01 - 0.1 мкФ | 1 | Поиск в магазине Отрон | ||
| С2 | Электролитический конденсатор | 47 мкФ | 1 | Поиск в магазине Отрон | ||
| С3 | Электролитический конденсатор | 47 - 100 мкФ | 1 | Поиск в магазине Отрон | ||
| GB1 | Источник питания | CR2025 или CR2032 | 2 | Два последовательно | Поиск в магазине Отрон | |
Скачать список элементов (PDF)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (14) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]
А с микрофоном уже был в видео "BEAM роботы своими руками. Часть 1"
Какая из них использовалась здесь?
[Автор]
Я использовал NE555P.
[Автор]
R2 - резистор базы сопротивлением 47-100 Ом
R3 - подтягивающий, ставить по желанию, сопротивление 10-15 кОм.
При удерживании любой кнопки пульта робот будет активирован. Минус в том что сигнал у пульта пульсирует, и это будет немного заметно.
[Автор]
Также рекомендую моторы побольше подключать не напрямую, а через транзистор.
[Автор]