








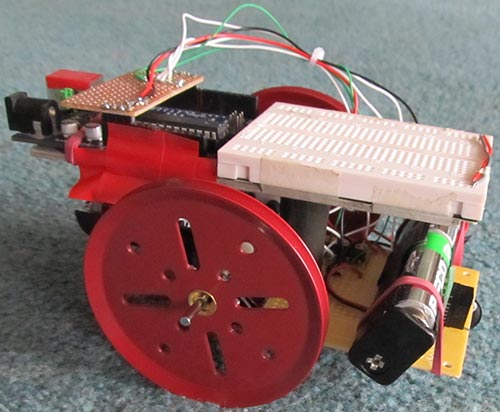
В этой статье описано создание очень простого робота на Arduino. На основе этого робота можно создать много проектов. Я планирую добавить к нему фоторезисторы, чтобы он шел на свет или следовал по линии. Arduino установлен на кусок столярной плиты, чтобы его можно было легко снять и использовать в других проектах. Провода идущие к Arduino надёжно зафиксированы во избежание их случайного отсоединения.
SPROT - аббревиатурой от слов Простой робот написанных на английском – SimPleROboT.
Необходимые материалы
Список деталей:
Arduino.
Макетная плата без пайки.
2 мотора с редуктором.
Интегральный драйвер моторов.
Маленький кусок столярной плиты.
ИК датчик расстояния.
1 шариковое колесо.
Провода.
Колеса (я использовал колёса из набора, но вы можете использовать другие).
Клей.
Резинки.
Клейкая лента.
Батарейки и разъем для них.
Необходимые инструменты:
Паяльник.
Ножовка.
Отвертки.
Изготовление шасси
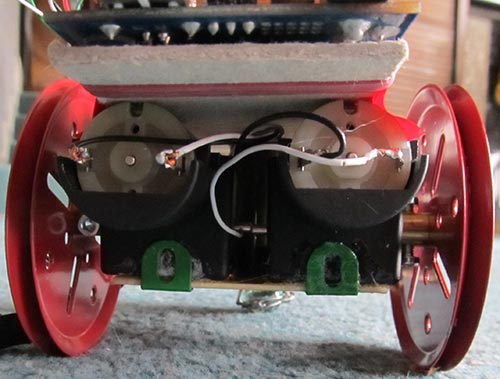
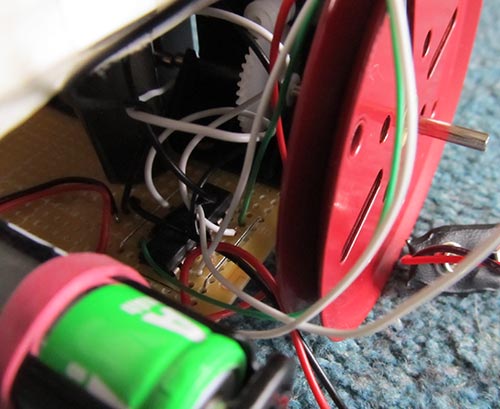
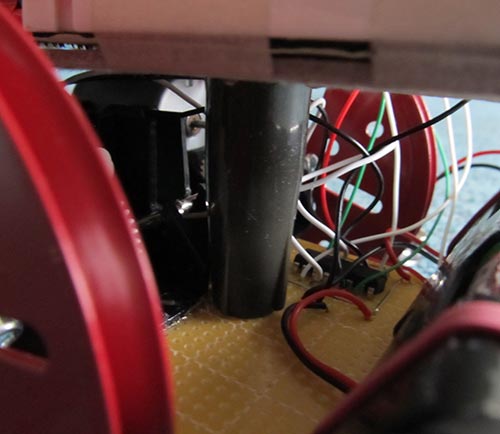
На шасси, сделанном из макетной платы находятся моторы и драйвер для них. Моторы закреплены при помощи суперклея и уголков, взятых из набора колес. Я сделал на макетной плате и на моторах много насечек для лучшей фиксации их на плате. Уголки приклеены на суперклей. Намного лучше было-бы просверлить на шасси отверстия и прикрепить уголки при помощи шурупов, но у меня не было необходимых сверл. Оси двигателей были укорочены при помощи ножовки.
Шариковое колесо я сделал из шарика и проволоки. Я обернул проволоку вокруг шарика несколько раз и припаял её концы к шасси.


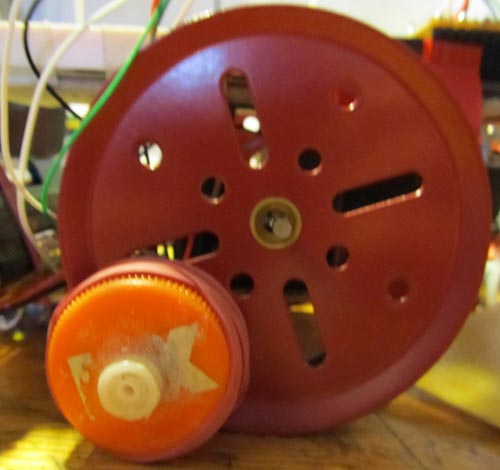
Колеса робота
Изначально я попытался использовать самодельные колеса из бутылочных крышек с резинкой. Эти колеса были очень цепкими, но у моторов не хватало сил, чтобы тянуть их. В конце концов я решил использовал колеса из набора, которые отлично подходят для моих моторов.
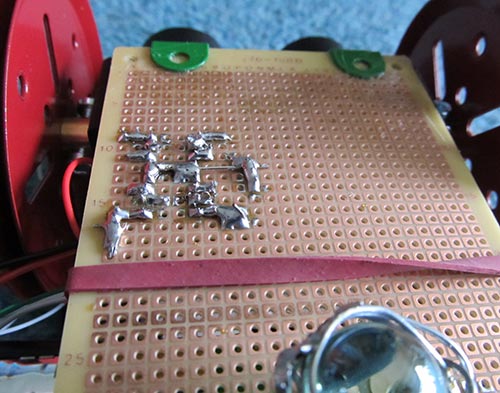
Управление двигателями
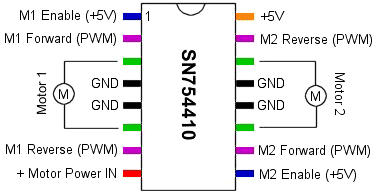
Я использовал интегральный драйвер моторов с H-мостом на 1А - SN754410. Эта микросхема может управлять двумя моторами. Я собрал эту схему на макетной плате, которая исполняет роль шасси, на котором закреплены двигатели. Вы можете сделать это на отдельных транзисторах, однако это займет намного больше места. Если драйвер моторов очень сильно греется, то необходимо использовать радиатор. Мне он не понадобился.
ИК датчик
ИК-датчик очень прост. Если в радиусе его видимости есть какой либо объект, то он посылает 1, а если нет, то 0. Этот датчик не может определить расстояние до объекта, он просто замечает его наличие. На этом датчике есть красный светодиод, который загорается при появлении в зоне видимость объекта, что очень облегчает отладку. Он подключается к 9 контакту Arduino, а два других контакта к аккумулятору 6В.
Я рекомендую поставить датчик не по середине, а немного отступив от края, так он будет работать намного лучше когда он один. В дальнейшем, я планирую добавить второй датчик на противоположной стороне шасси.
Мозг робота
Робот управляется клоном Arduino – freeduino, который также использует Arduino IDE. Вы можете использовать picaxe или любой другой микроконтроллер. Я подсоединил к Arduino кусок макетной платы. Этот кусок охватывает контакты от 8 до 13 и первые четыре контакта нижнего ряда. Но оттуда используется только +5В и GND. Arduino работает от 4х батарей AA, которые прикреплены к столярной плите. H-мост имеет 4 входа для управления двигателями. Я использовал контакты 10,11,12,13, которые поддерживают ШИМ, что позволяет контролировать скорость.
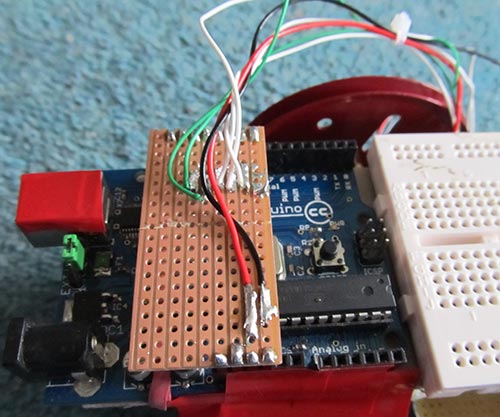
Макетная плата
Макетная плата не обязательна, но полезна, если необходимо что-то проверить и быстро переделывать без пайки. Я прикрепил макетную плату на столярную плиту, на которой закреплен Arduino, при помощи клейкой ленты и подпер её пластиковой трубой.
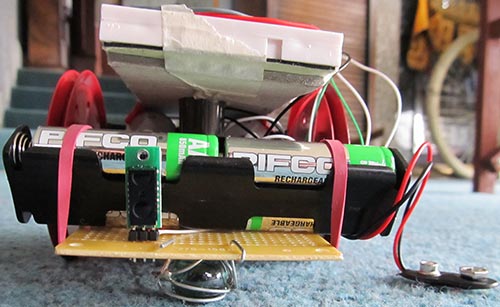
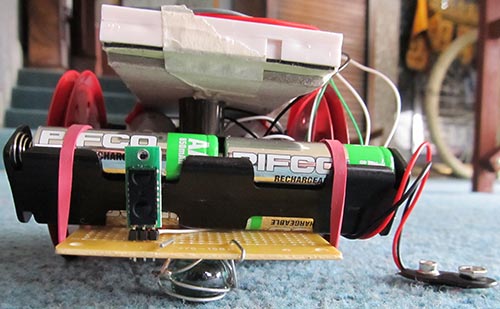
Батарейки
Проект использует 4 AA батарейки и и держатель для них. Они обеспечиваю чуть более 5В, чего хватает для Arduino. Также батареи служат в качестве противовеса для тяжелых моторов. Нежелательно использовать более лёгкие батареи (например, литий-полимерный аккумулятор), т.к. они не смогут быть хорошим противовесом.
Возможные улучшения
Это очень простой робот, а значит много возможностей для улучшения и расширения функциональности робота. Я планирую добавить еще один датчик расстояния и фоторезистор, чтобы робот мог идти по линии или на источник света. Возможно, я добавлю к нему лапы которые смогут подбирать вещи, или мини-пылесос, это превратит его в робота-чистильщика.
- ir_line_folow.pde (1 Кб)
 none
none
 Опубликована: 2012 г.
Опубликована: 2012 г.


 Вознаградить
Вознаградить



Комментарии (0) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация