








В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
UPD 28.06.2020 ------------------------------>
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

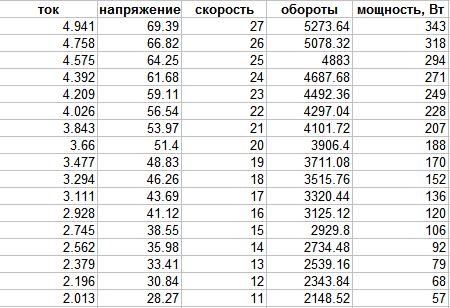
Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
<----------------------- UPD 28.06.2020
Первое что вас шокирует это то, что в этом двигателе не будет железа. Не нужно нарезать пластины статора или ротора на лазерном оборудовании, собирать в пакеты и подгонять всю конструкцию к микронной точности. Это обычно мешает обычным людям создавать самим двигатели. Вы удивитесь насколько проста конструкция и не поверите полученным от нее характеристикам.
Обычно вбивая в поиск на ютубе например "электродвигатель своими руками" вы видите катушку и магнит и это вращается и все знают, что да это работает, но кпд там ничтожный и нормальную тягу создать не может. Но, все ошибаются, на самом деле используя правильно катушку и магнит можно сделать мощный двигатель с высоким кпд.
С чего все начиналось. Когда-то просматривая патенты на двигатели я обратил внимание на двигатель из катушки внутри которой вращался длинный магнитный стержень закрепленный на валу, такая конструкция не приобрела распространение по причине низкого кпд из за слабых магнитов которые были в то время и немного неправильной конструкции. Забегая наперед скажу какой должна быть идеальная конструкция двигателя - магнит сферической формы закрепленный на оси полюсами перпендикулярно оси вокруг него располагается круглая катушка квадратного сечения (через нее проходит ось поэтому можно ее разделить на 2 части и разместить ближе к оси) - все - конструкция готова, остается закрепить все в корпусе и получится двухтактный двигатель. Правда найти такой магнит в продаже мне еще не удавалось но если все начнут делать такие двигатели то скоро появятся.
Сейчас в продаже есть магниты цилиндры диаметрально намагниченные с отверстием по оси, они почти идеально подходят (лучше на сейчас нету), стоят они в общем не дешево но все равно дешевле готовых двигателей раза в 2-5, самые крупные внутри катушки с током (15А 100-200 витков) руками не провернуть уже (за магнит не за ось, а за ось и плоскогубцами не провернуть). Первое опасение мое было когда я запускал такой двигатель на самокате - было, не порвет ли он случайно зубчатый ремень при старте. То-есть понимаете что это уже не те игрушечные двигатели с катушкой и магнитом что вы видите на ютубе.


Теперь о КПД, оказалось все очень просто и предсказуемо, когда магнит цилиндр (сфера) повернут полюсами к виткам катушки то сила магнитного поля действует на магнит по касательной то-есть перпендикулярно к радиусу создавая максимальный вращательный момент а когда он повернут полюсами по оси катушки то момент равен нулю а это означает что в таком положении если подать на катушку ток он весь 100% пойдет в нагрев и кпд вращения = 0%, а когда он повернут полюсами к катушке то кпд максимум и зависит от установившегося тока при определенной нагрузке. Например если в этой точке при напряжении питания 10в установился ток 1А то полное сопротивление (активное + реактивное) = 10 Ом и если при этом сопротивление самой обмотки 1 Ом то кпд в той точке 90% (ну и соответственно если сопротивление обмотки 0,1 Ом то кпд 99%). Вывод - обмотка должна быть с как можно меньшим сопротивлением и запитывать ее нужно в тех точках где кпд максимальный их однозначно нельзя запитывать когда магнит повернут вдоль оси или почти вдоль оси так как это 90-100% потери (нагрев). И в этом можно убедится если собрать простой драйвер на 2х ключах (схема в конце статьи) и подать управление от микросхемы с почти любого куллера с 4мы выводами (контроллер управления куллером с встроенным датчиком холла и 2мя выходами которые обычно подключают напрямую к обмоткам). КПД будет на уровне 55% (максимум 72,2% минус потери на сопротивлении зависит от нагрузки на двигатель). Вы уже наверно поняли как нужно повышать КПД, сокращать угол запитки со 180 град до 90 - 45 - 30 - 15, чем меньше тем кпд ближе к 100% но снижается тяга. Где разумный предел, получается при 180 угле потребляем 100 вт отдаем в нагрузку 50-70 вт, если сократить угол до 90 то потребляем 50 вт а отдаем в нагрузку 37 - 44 - (максимум 89,97% - потери) кпд выше но отдаваемая мощность ниже при том же напряжении питания, 120 град (будет аналогично 3хфазному теоретический максимум 86% - потери на активном сопротивлении). Нужен двигатель с большой равномерной тягой и кпд 95%? Запросто - берете 6 магнитов на одну ось со смещением угла катушек или магнитов по 30град получаем 6ти фазный 12 тактный двигатель (аналог 12 цилиндровому двс) с кпд до 97.2% который также можно перепрограммировать на любой другой угол фазы и жертвуя кпд поднимать тягу еще в 2-3 раза при необходимости.
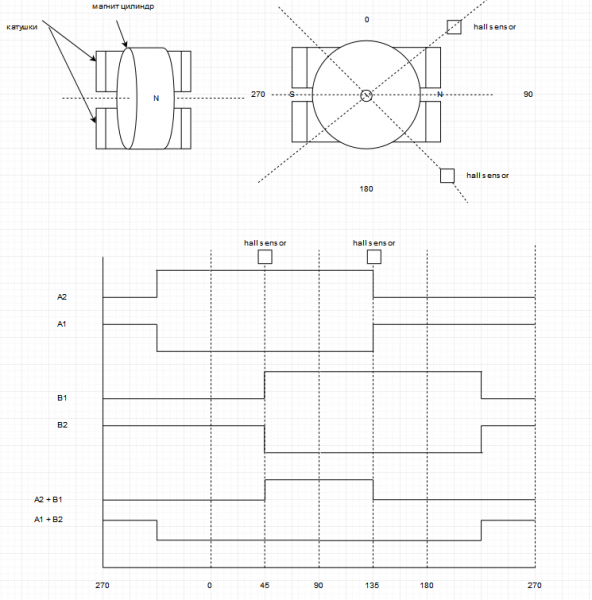
Эскиз ниже показывает конструкцию двигателя и размещение датчиков холла (в примере датчики холла разведены от середины катушки на угол 45 градусов что дает 90 градусов угол запитки обмоток, когда полюса магнита находятся максимально близко к виткам катушки)
Мой двигатель однофазный двухтактный с углом запитки 110 град выдал кпд 87% на скорости 13 км/ч с нагрузкой 92 кг по ровной дороге при этом обмотки заклеенные в закрытом деревянном корпусе за час непрерывной езды нагрелись аж до 41 градуса при среднем потреблении двигателя 88 Вт. Две обмотки по 125 витков в параллель проводом диаметром 0,83 мм, магнит 65 диаметром, 30 высота, внутренний 18 мм ссылка. В сумме меди 260 грамм из расчета на 260 Вт. Мой вес 85 кг (самокат 8кг с двигателем и батареей, легче только из карбона), питание 10х Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на ~15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит - самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 - 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
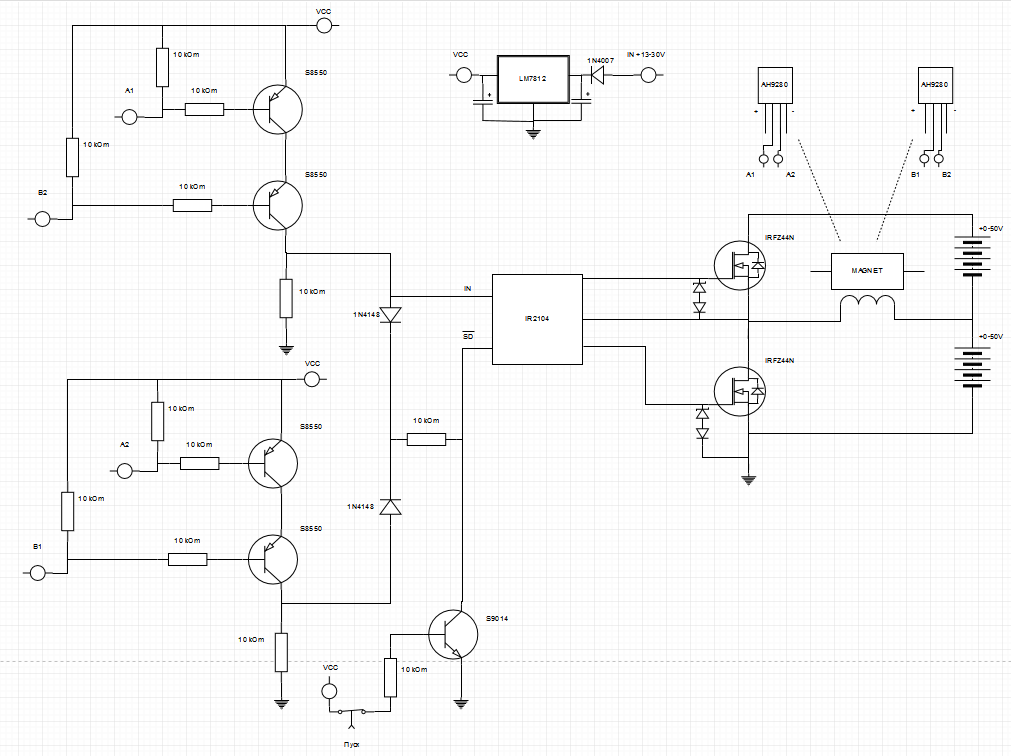
Фраза "шим регуляция" у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 - 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера - реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 - включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит (< 90 град) для двухтактного двигателя, хоть потребление будет и ниже на холостом но создать достаточную тягу будет сложнее так как в меньшие промежутки времени придется вложить больше мощности а это дополнительные потери на контролере и батарее.
Цена
- болт (вал), гайки и шайбы (фиксация магнита и подшипников), немагнитные шурупы (нержавейка, для скручивания корпуса) < 2$
- корпус (брус 1,5м х 80 х 20) = 1,3$
- зубчатые колеса и ремень = 8$
- магнит = 50$
- платы и все детали < 10$
- 10х Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в ~110$
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный


 Опубликована:
Опубликована:
 Изменена: 28.06.2020
Изменена: 28.06.2020


 Вознаградить
Вознаградить




Комментарии (39) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]
[Автор]
На али я не смог найти, если кто найдет оставьте ссылку, ну и некоторые производители делают под заказ, но минимальный заказ от 30-100 шт
https://forum.cxem.net/applications/core/interface/file/attachment.php?id=655100
По ссылке расчет катушки под требуемую скорость, инструкция как пользоватся там есть в первом лите, он актуален для магнита который я использовал
[Автор]
2. Цена нереально высокая для такого веса 26.95$ за 50 грамм (тот что я использовал 685 грамм стоил 50$)
3. Толщина магнитного слоя 4мм это значит что поле на расстоянии более 2 мм уже меньше половины силы магнита, а витки уложить в толщину 1,5 мм возможно только очень тонким проводом, в итоге и 50 вт с трудом оттуда выжать можно и с низким кпд из за тонкого провода
4. Обороты будут 30-50 тыс, нужны спец подшипники которые рассчитаны на такие скорости с очень низким трением и редуктор нужен 1 к 100
Вывод: двигатель на самокат из этого не выйдет, но 4 двигателя для квадрокоптера сделать можно, но очень дорогие магниты
D60*6*30 EXW price
N38-- US$34.20/piece
N40-- US$35.85/piece
N45-- US$40.85/piece
N48-- US$42.50/piece
N50-- US$44.20/piece
N52-- US$47.50/piece
(у N52 на 30% выше момент чем у N38 который я использовал)
Цены при заказе от 100 шт тут: http://www.industrialneodymiummagnets.com/
Поштучно не нашел пока на али, а все производители делают на заказ партиями от 100 шт. Если найду поштучно - дам ссылку
[Автор]
https://www.alibaba.com/product-detail/-LYC-Cheap-Price-Diametrically-magnetized_62220276262.html
И вроде как могут отправить 1 образец за 1$!
[Автор]
2 обмотки по 20 витков проводом диам 0,8мм (все витки расположенные на расстоянии от поверхности магнита не более 3-4мм) последовательно и еще 2 обмотки повернутые на 90 градусов - получится двухфазный двигатель >150Вт, передаточное число 35 на колесо диам 200мм,
Угол запитки 90 град, питание обмоток ограничить длительностью включения 0,75 мс, реализуется на 555 таймере расчет есть тут http://electe.blogspot.com/2014/01/2-555.html
со схемы урпавления сигнал (инвертированный) на вход SD подается через таймер
Питание до 2 по 25В, транзисторы IRFB3077, кпд может достигать 90% (при 50-100Вт нагрузки) (>200Вт, кпд ниже 85%) но подшипники нужны хорошие и не магнитные иначе будет потеря мощности и кпд на них
Полную схему и инструкцию по сборке могу оформить в отдельной статье, если будет кому интересно, пока особо интереса я не заметил, по крайней мере на этом сайте
[Автор]
При питании 28 вольт (конденсаторный делитель 2 по 14в) 20340 об/мин холостой ход, на нагрузке с потреблением 52вт обороты 16080, подшипник сильно греется потери на нем 11вт на холостом ходу и около 9вт на нагрузке итого кпд получился 71,3%, нужен подшипник с низким трением
Чистый кпд ел мощность в мех 82%, проверено включением второй обмотки в качестве генератора и замерена выпрямленная мощность:
- вход - 52вт
- кпд контроллера 98% - на катушку подается 52*0,98 = 50,96Вт
- кпд катушки 82% - в мех мощность превращается - 50,96*0,82 = 41,78Вт
- подшипник расходует из них 9,45Вт (на таких оборотах 16080): 41,78 - 9,45 = 32,33Вт остается на валу
- генераторная катушка преобразует мех мощность в электрическую с кпд 82% - 32.33*0.82 = 26.51Вт
- замеренная на нагрузке выпрямленная мощность на выходе 26,48Вт (кпд выпрямителя 96%)
КПД 26.5/52*100 = 50.9% (после двойного преобразования, электрическая мощность в механическую, и обратно в электрическую),
а это корень(0,509) = 71,3% кпд каждого преобразования (52 * 0,713 * 0,713 = 26,43)
Это замер на 1 катушке, с 2мя кпд чуть выше с 82% до 85% и мощность Х2 (104Вт не максимум) минус потери на подшипнике выходит 76% доступно мех мощности на валу, как обычно на подшипниках сэкономил
Точка максимального кпд при 75Вт нагрузки на 1 обмотку, на две получается 150Вт это на небольшом магните за 5.5$ (10$ в сумме с контроллером стоимость)
Попробую на самокат прикрепить если маловато будет мощности то можно из него сделать шлиф машинку или мини дрель (100Вт в 1 обмотку кратковременно пускал, многовато.. греется)
[Автор]
Но есть и минус - в отличии от сферы и цилиндра очень близко подвести витки к поверхности магнита не получится, то-есть момент у такого двигателя будет ниже а обороты выше, нужен будет редуктор с большим передаточным числом (на 30-35% больше чем с цилиндром)
Или даже взять стальное кольцо - кусок трубы, выточить дюралевую (текстолитовую - гетинаксовую) шайбу - цилиндр, влезающую в то кольцо, прикрепить кольцо к шайбе четырьмя винтами в потай радиально взаимно под 90 градусов, между 2 винтами кольцо перерезать в двух местах диаметрально противоположных и внедрить в прорези неодимовые магниты - параллелепипеды полюсами одним на одну часть трубы, другим на другую? ось, соответственно, ось шайбы.
[Автор]
Например этот двигатель в качестве генератора при 3000 оборотах на валу выдаст на нагрузку 3,4 Ом ~50В 14А
[Автор]
Нашел вот такие магниты.
Или есть сферические но без отверстия. В общем хочу двигатель меньший по весу, но больше мощности. Подшипники керамические.
Двигатель мотор колесо - 1000w
Параметры контролёра 48в 30а 2000 w (походу китайских т к греет сильно)
Батареи - 15ah 48v
Благодарю заранее за любую информацию
Само действие без постоянного подключения (экономия, тихий ход)
[Автор]
[Автор]
[Автор]
Ну и рекомендую запилить видео об этом двигателе, разместим его на канале "ПаяльникТВ"
[Автор]
По видео что интересует? Заснять могу, но я не умею работать на камеру и не знаю про что именно в нем рассказывать
[Автор]
Кстати вес двигателя с контроллером и креплением 1,6кг, а детали самого двигателя меньше 1 кг
И по магниту - он дороговат но запас у него до 1 квт мощности а может и больше, поменьше в продаже не было (300 грамм хватило бы), может в будущем переделаю двигатель на киловатный
[Автор]
[Автор]
[Автор]
Вот новая версия для однофазного
https://forum.cxem.net/applications/core/interface/file/attachment.php?id=654593
[Автор]
Расчет катушки под требуемую мощность двигателя
[Автор]
[Автор]
2) Не много еще не сообразил, в моем понимании (катушка без сердечника) то есть по факту работать будет та ее часть которая перпендикулярна магнитному полю полюсов магнита, я вижу ее самой короткой стороной (прямоугольная катушка у тебя на фото),если не сложно обрисуй магнитные поля, что с кем пересекается.
3) Так как я понял (вероятно могу ошибаться) этот двиг. что то вроде обычного коллекторного, только механический коллекторный узел заменен электронной составляющей (такое представления из-за не представления как там у Вас кто с кем пересекается, ну и нехватка знаний:)
4) Интересует возможность собрать двиг низкооборотистый (1000-2000) но с хорошим крутящим моментом 100-150н/м,вес не так важен. Коммутировать понятно схему надо будет менять (но принцип понятен: сигнал с датчика-импульс в катушку).Интересно потому что опять же не понимаю Вашего фокуса... (в голове представляется маленький асинхронник от вентилятора или подобный, только с датчиками положения ротора и конкретным моментом импульсов в катушки) если так , то под мои критерии подойдет в принципе обычный трехфазный асинхронник киловатт на 7,5....с другой стороны в катушку по Вашим наработкам и в моем представлении можно почти мгновенно вкачать кучу энергии, скажем с помощью кондеров...вот он и крутящий момент.
5) Буду читать Вашу статью пока не пережую все+ссылки и калькуляторы изучу.
[Автор]
но лучше взять блок питания на нужное напряжение + плата бмс
E меня в холдерах потому что я экспериментирую, часто меняю напряжение или двигатели, мне нет смысла сваривать батарею и делать ее на фиксированное напряжение