








Голосовое управление освещением X10 (см. Часть1, Часть2, Часть3, Часть4) и Голосовое оповещение для дома. Будильник в системе ROS являются частью умного дома на ROS.
Добавим в эту систему получение данных с сервера домашней метеостанции (здесь и добавление функционала).
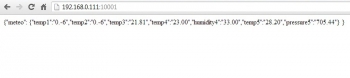
При произнесении фразы "Погода" - компьютор должен голосом сообщить данные о температуре воздуха на улице, влажности воздуха и атмосферного давления. Сервер домашней метеостанции при обращении к нему по адресу в домашней сети (192.168.1.111:10001) отдает показания в формате JSON.
Сначала в проекте vp_x10_voice создадим дополнительный узел node_x10_alarm_weather_meteo1, который будет являться слушателем (subscriber) темы x10_alarm_weather, в тему публикуются данные std_msgs/Int16 - числовой аргумент (номер датчика ), узел обращается к серверу домашней метеостанции, расположенному в сети, получает данные в формате JSON, выбирает данные для нужного датчика и формирует фразу (строку std_msgs/String). Далее фраза публикуется в тему x10_alarm_festival для произнесения фразы голосом (см. Голосовое оповещение для дома. Будильник в системе ROS).
Например мы произносим фразу "погода улица", узел node_x10_voicetotext распознает ее и отправляет сообщение в тему x10_alarm_weather, считываются данные по запросу к серверу домашней метеостанции и формируется фраза, например "Температура воздуха 17 градусов относительная влажность 60 процентов", фраза публикуется в тему x10_alarm_festival и программа festival произносит эту фразу голосом.
Меня интересуют данные
temp4 - температура на улице с датчика DH11
humidity4 - влажность на улице с датчика DH11
pressure5 - атмосферное давление
Предусмотрим в программе этот момент (формирование фразы для festival для данных с разных датчиков). Пишем скрипт node_x10_weather_meteo1_sub.py
#!/usr/bin/env python
#-*-coding:utf-8 -*-
#
# Слушатель x10_weather
# по запросу в тему x10_alarm_weather
# получение данных с сервера домашней метеостанции
# и отправка данных для голосового сообщения
# в тему x10_alarm_festival
#
import roslib; roslib.load_manifest('vp_x10_voice')
import rospy
import subprocess
import shlex
import urllib2
import json
from std_msgs.msg import String
from std_msgs.msg import Int16
URL_METEO="http://192.168.0.111:10001"
def controller(data):
number = data.data
pub1 = rospy.Publisher('x10_alarm_festival', String)
message=""
global temps
global humiditys
global pressures
res=urllib2.urlopen(URL_METEO).read()
data_sensors=json.loads(res)
if number==1 :
try:
temps=data_sensors['meteo']['temp1']
tt=int(float(temps)+0.5)
message="Температура воздуха "+str(tt)+" градусов"
except ValueError:
message="Ошибка считывания с датчика температуры 1 "
elif number==2 :
try:
temps=data_sensors['meteo']['temp2']
tt=int(float(temps)+0.5)
message="Температура воздуха "+str(tt)+" градусов"
except ValueError:
message="Ошибка считывания с датчика температуры 2 "
elif number==3 :
try:
temps=data_sensors['meteo']['temp3']
tt=int(float(temps)+0.5)
message="Температура воздуха "+str(tt)+" градусов"
except ValueError:
message="Ошибка считывания с датчика температуры 3 "
elif number==4 :
try:
temps=data_sensors['meteo']['temp4']
humiditys=data_sensors['meteo']['humidity4']
tt=int(float(temps)+0.5)
dd=int(float(humiditys)+0.5)
message="Температура воздуха "+str(tt)+" градусов"
message+=" относительная влажность "+str(dd)+" процентов"
except ValueError:
message="Ошибка считывания с датчиков 4 "
elif number==5 :
try:
temps=data_sensors['meteo']['temp5']
pressures=data_sensors['meteo']['pressure5']
tt=int(float(temps)+0.5)
pp=int(float(pressures)+0.5)
message="Температура воздуха "+str(tt)+" градусов"
message+=" давление "+str(dd)+" миллиметров ртутного столба"
except ValueError:
message="Ошибка считывания с датчиков 5 "
elif number==99 : #запрос по голосу Погода
try:
temps=data_sensors['meteo']['temp5']
pressures=data_sensors['meteo']['pressure5']
humiditys=data_sensors['meteo']['humidity4']
tt=int(float(temps)+0.5)
dd=int(float(humiditys)+0.5)
pp=int(float(pressures)+0.5)
message="Температура воздуха "+str(tt)+" градусов"
message+=" относительная влажность "+str(dd)+" процентов"
message+=" давление "+str(dd)+" миллиметров ртутного столба"
except ValueError:
message="Ошибка считывания с датчиков "
#temps=[meteo1['temp3'] for meteo1 in data_sensors['meteo']]
rospy.loginfo(temps)
pub1.publish(message)
def listener():
rospy.init_node('node_x10_alarm_weather_meteo1')
sub = rospy.Subscriber("x10_alarm_weather",Int16,controller)
rospy.spin()
if __name__ == '__main__':
listener()
Теперь необходимо добавить в скрипт node_x10_voicetotext.py распознование фразы "погода" и отправка сообщения ( std_msgs/Int16 =99) в тему x10_alarm_weather.
Измененный скрипт node_x10_voicetotext.py:
#!/usr/bin/env python
#-*-coding:utf-8 -*-
import roslib; roslib.load_manifest('vp_x10_voice')
import rospy
import subprocess
import shlex
from std_msgs.msg import String
from std_msgs.msg import Int16
fraza=["люстра","лента","лампа","ночник","елка",
"люстра включить","лента гори","лампа включить","ночник включить","елка гори",
"отбой",
"программа 1","программа 2","программа 3","программа 4","программа 5",
"погода"]
matrix = [["люстра","быстро"],
["лента"],
["лампа","лапа"],
["ночник","начни"],
["елка","елочка"],
["люстра включить","люстра ключи","быстро включить"],
["лента гори","mp3"],
["лампа включить","лампа включи","лампа ключи"],
["ночник ключи","ночник включить","ночник включи","ночник горит","ночник гори"],
["елка гори","елочка гори","елка горит"],
["отбой","всем спать","я спать"],
["программа 1","драма 1"],
["программа 2","драма 2"],
["программа 3","драма 3","программа тв"],
["программа 4","драма 4"],
["программа 5","драма 5"],
["погода"]]
def talker():
pub1 = rospy.Publisher('x10_voicetotext', Int16)
pub2 = rospy.Publisher('x10_alarm_weather', Int16)
rospy.init_node('node_x10_voicetotext')
while not rospy.is_shutdown():
rospy.loginfo("ожидание записи с микрофона")
subprocess.Popen('rec -q -c 1 -r 16000 current.wav silence 1 0.2 3% 1 0.2 3%',shell=True,cwd = '/home/petin/ros_pkgs/vp_x10_voice/nodes/').communicate()
rospy.loginfo("wav - ok")
subprocess.Popen('flac -f -s current.wav -o current.flac',shell=True,cwd = '/home/petin/ros_pkgs/vp_x10_voice/nodes/').communicate()
rospy.loginfo("flac - ok")
proc3=subprocess.Popen('php textfromgoogle.php',shell=True, stdout = subprocess.PIPE,cwd = '/home/petin/ros_pkgs/vp_x10_voice/nodes/')
result=proc3.communicate()[0]
str1 = "result api google = %s"%result
rospy.loginfo(str1)
str2=""
index=0
for ind,elements in enumerate(matrix):
for element in elements:
if result.count(element)>0:
str2=fraza[ind]
index=ind+1
if(index=17):
pub2.publish(99)
rospy.loginfo(str2)
elif(index>0):
pub1.publish(index)
rospy.loginfo(str2)
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException: pass
Теперь при запуске дополнительного узла
$ rosrun vp_x10_voice node_x10_weather_meteo1_sub.py
и произнесении фразы "погода", компьютер выдает голосовое сообщение вида "Температура воздуха XX градусов относительная влажность YY процентов давление ZZZ миллиметров ртутного столба".
В прикрепленном файле архив с проектом vp_x10_voice для ROS.
- vp_x10_voice2.tar (5680 Кб)

 Опубликована: 14.05.2013
Опубликована: 14.05.2013


 Вознаградить
Вознаградить




Комментарии (0) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация