Автономное устройство, предназначенное для самостоятельного перемещения по местности, выполнения каких-либо автоматизированных функций (если рассматривать в контексте "хобби") и т.п.

В статье описано создание робота, который ездит по линиям и может проехать через лабиринт, а потом кратчайшим путем вернутся в начало. Этот робот получился у меня с 3-ей попытки.
Автор: Касьянов А.
 2
2

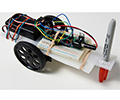
Как понятно из названия, это робот на контроллере Arduino UNO. К нему разработаны собственные библиотеки для простого и удобного использования. В обычной комплектации робот содержит два двигателя, два колеса и дальномер, установленный на передней панели. Также сверху на нём есть макетная плата для добавления разнообразных устройств на ваше усмотрение. Он работает и управляется автономно, однако к нему можно добавить радиоуправление.
Автор: none
3

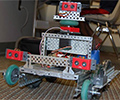
В этой статье подробно описано создание четвероногого робота (робот называется FIER). При конструировании робота я постарался получить максимальную отдачу от затраченных средств.
Автор: none
0
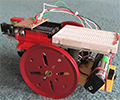
В этой статье описано создание очень простого робота на Arduino. На основе этого робота можно создать много проектов. Я планирую добавить к нему фоторезисторы, чтобы он шел на свет или следовал по линии. Arduino установлен на кусок столярной плиты, чтобы его можно было легко снять и использовать в других проектах. Провода идущие к Arduino надёжно зафиксированы во избежание их случайного отсоединения
Автор: none
0

Используемый здесь метод управления сервоприводами отличается от обычного аппаратного ШИМ. Я использовал кольцевой буфер для хранения позиции сервоприводов и значений на выходе. Для этого используется только прерывание таймера. Такой метод обычно применяется в дешевых микроконтроллерах с ограниченным аппаратным ШИМ. Такой программный ШИМ не является идеальным, но его хватает для управления сервоприводами
Автор: none
0

В этой статье описано строительство плавающего робота из доступных материалов. Также эта статья является хорошим примером повторного использования бутылок от воды. Я использовал два бутылки от воды, полиморфный пластик, два двигателя с винтами, изоленту, корпус, батарею и motoruino (клон Arduino предназначенный для работы с двигателями, сервоприводами и датчиками).
Автор: none
1

Этот проект основан на статье плавающий робот из бутылок своими руками. Добавлены датчики для избегания препятствий и движения на свет. Я использовал Arduino как контроллер, установил ультразвуковой датчик спереди, несколько кнопок без фиксации по краям лодки, и несколько датчиков света с обеих сторон.
Автор: Касьянов А.
0
Эта статья является пошаговым руководством для создания автономного робота с авто навигацией. Для управления роботом используется Arduino. Есть две различных программы для робота. Первая программа позволяет роботу везде ездить, избегая препятствий. Для определения препятствий используется два ультразвуковых датчика. Другая программа использует двумерный массив для составления плана окружающих предметов.
Автор: none
0

Некоторое время назад я сделал мышь Herbie Junkbot. Мне понравился простой способ указания направления вращения двигателя при помощи ОУ и реле. Также я смотрел на шестиногого робота. Потом сайт Lego с расположение ног исчез, но я смог найти близкий по содержанию сайт. Эту конструкцию можно рассматривать в качестве добавления шести ног к Boe-Bot. Jameco и другие фирмы производят наборы для сборки роботов.
Автор: none
3