








В этой статье мы займемся постройкой своего робота с нуля. То, что у нас получится, смотрите на фото ниже. Робот будет ездить как самостоятельно, так и под управлением смартфона. А еще мы рассмотрим постройку своего мобильного робота с нуля.
3D принтер
Если я хочу построить робота я должен определиться с выбором платформы, на которую я буду устанавливать двигатели, платы, аккумуляторы. Я, конечно, могу приобрести готовый вариант, но интереснее сделать платформу самому. Такая платформа точно будет соответствовать вашим требованиям. Платформу можно сделать из орг. Стекла, фанеры, а я сделаю ее из пластика.
Вы можете сказать, что платформу самому делать неудобно и потребуется множество инструментов, начиная от кернера и заканчивая шлифовальным станком. А я говорю, что нам понадобится воображение и 3D принтер.
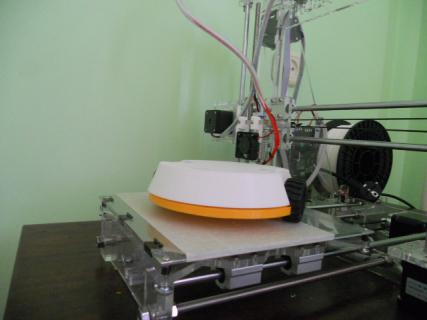
3D принтер? Всем, наверное, знаком обычный офисный принтер, который может распечатать на А4 нужный нам текст. Так вот, 3D принтер – это принтер, который может распечатать нужную деталь. Есть разные 3d принтеры. У меня принтер с технологией FDM (послойное наплавление). Какие еще есть технологии 3d печати, можно узнать в интернете.
Многие 3D принтеры работают на Arduino. При желании, можно собрать свой 3D принтер. Главная идея 3D принтера в том, что можно печатать абсолютно любую вещь, мы же напечатаем корпус для робота.
Для начала определимся с описанием платформы. Я хочу, чтобы платформа была двухколесной и в нее должны помещаться Arduino, питание, моторы и несколько датчиков.
Теперь нужно нарисовать макет платформы на бумаге и разместить на ней нужные компоненты. Например, вот так.

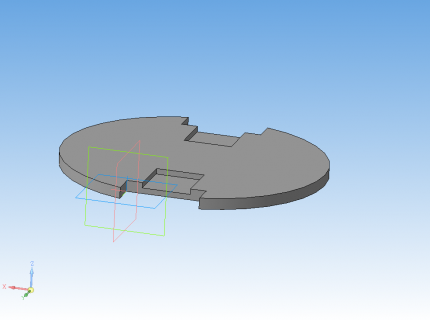
Когда макет будет готов, нужно будет сделать 3D модель платформы. Для этого существует множество программ. Я, обычно, пользуюсь программой Компас. Я не буду учить работать с Компасом, но если вам интересно, можете посмотреть в интернете или попросить в комментариях сделать урок по Компасу.
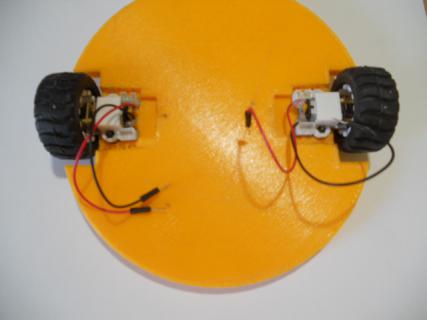
Вот такая платформа получилась у меня.
После этого нужно преобразовать 3D модель в G-код, понятный 3d принтеру. Для этого существуют специальные программы - слайсеры. Я использую программу Repetier-Host со слайсером Sli3er. Вот как выглядит деталь, готовая к распечатке.
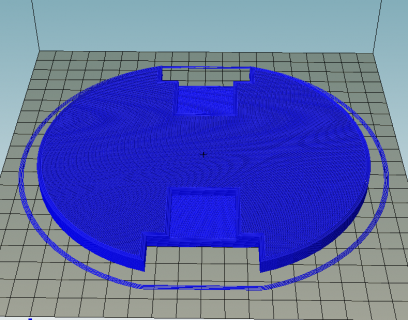
А вот распечатанная модель.
Только недавно у нас была идея, а готовая деталь уже перед нами. С помощью 3D принтера можно создавать уникальные вещи в единичных экземплярах. 3D принтер – классная штука. Советую всем!
Моторы
Теперь нужно подумать о том, как наш мобильный робот будет двигаться. Первое, что приходит на ум – колеса. Так и поступим.
Если кто помнит, мы уже пробовали подключать мотор к Arduino. Кто не помнит, не знает или не читал – смотрим тут. В подключении мотора с помощью MOSFET есть существенные недостатки – невозможно оперативно менять скорость и направление вращения. Пришло время научить Arduino управлять моторчиками по-настоящему!
Для этого можно использовать микросхему L293D. L293D позволяет управлять сразу двумя моторами, с током 600 мА на канал и пиковым до 1000 мА, а если объединить каналы – то до 1200 мА и 2000 мА пикового тока. Про объединение расскажу ниже.
Для начала, как всегда, следует посмотреть на Datasheet, чтобы разобраться, куда и что подключать. Если вы не знаете о микросхемах, то стоит прочитать эту статью.
Приступим. Соберем простенькую схему с одним мотором и порулим им. Внимание на схему сборки.
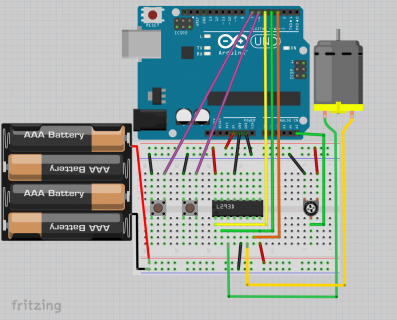
Если не знаете английский или просто не разобрались в Datasheet, то вот описание подключения. Нумерацию микросхем, надеюсь, все знают или узнали из статьи про микросхемы.
- Пин 1 – Отвечает за скорость вращения мотора. Аналогичный - на пине 9. Принимает значения от 0 до 255, что без проблем можно организовать с помощью PWM.Я подсоединил EN к пятому пину Arduino, который поддерживает PWM.
- Пины 2 и 7 – Отвечают за направление движения мотора. Аналогичные - на пинах 10 и 15. Подача логической единицы на один из этих пинов заставит мотор крутиться в одну сторону (зависит от подключения мотора), подача логической единицы на другой – заставит мотор крутиться в обратную сторону.
- Пины 3 и 6 – К ним нужно подключать мотор. Полярность не важна, от подключения будет зависеть только направление вращения. Аналогичные - на пинах 11 и 14.
- Пины 4 и 5 – Это земля. Думаю, не нуждается в пояснении. Аналогичные – 12 и 13.
- Пин 8 – Питание для моторов. На него нужно подать питание в диапазоне от 4.5 до 36 Вольт
- Пин 16 – на него подается логическая единица с Arduino. 5 Вольт, если что.
Отлично! Мотор подключили. Теперь можно и покодить.
#define FRW_BUT 7 //Кнопка "вперед"
#define BCW_BUT 6 //Кнопка "назад"
#define SPD 5 //Управление скоростью вращения...
#define FRW 4 //...направлением вращения(вперед)...
#define BCW 3 //...направлением вращения(назад)
#define SPD_POT A5
int xspeed = 0; //Переменная для определения скорости вращения мотора
int frw_move = 0; //Переменная для команды "вперед"
int bcw_move = 0; //Переменная для команды "назад"
void setup()
{
//Обозначаем пины
pinMode(SPD, OUTPUT);
pinMode(FRW, OUTPUT);
pinMode(BCW, OUTPUT);
pinMode(SPD_POT, INPUT);
pinMode(FRW_BUT, INPUT_PULLUP);
pinMode(BCW_BUT, INPUT_PULLUP);
}
void loop()
{
//Считываем показания с потенциометра
//и приводим их в нужный диапазон - от 0 до 255
//После - передаем на пин регулировки скорости
xspeed = analogRead(SPD_POT);
constrain(xspeed, 0, 1023);
xspeed = map(xspeed, 0, 1023, 0, 255);
//Определяем нажатие кнопки "вперед"
if(!digitalRead(FRW_BUT))
{
frw_move = 1;
}
else
{
frw_move = 0;
}
//Определяем нажатие кнопки "назад"
if(!digitalRead(BCW_BUT))
{
bcw_move = 1;
}
else
{
bcw_move = 0;
}
//Вызываем функцию по отправке данных на L293D
motor();
}
void motor()
{
//Отправляем данные на L293D
analogWrite(SPD, xspeed);
digitalWrite(FRW, frw_move);
digitalWrite(BCW,bcw_move);
}
Как работает? Работает просто. При нажатии на левую кнопку колесо крутится в одну сторону, а при нажатии на правую – в другую. Поворотом ручки потенциометра можно регулировать скорость вращения моторчика. Действие нашей испытательной установки для моторчиков показано на видео.
З.Ы. Да, знаю, что качество видео не супер, но постараюсь найти нормальную камеру и организовать место для съемки как можно скорее.
Теперь про соединение каналов L293. Если хочется подключить более мощный моторчик, то можно объединить каналы.
Первый способ – параллельно соединить аналогичные выводы микросхемы, что даст прибавку к максимальной силе тока в два раза. Минус – к одной микросхеме можно подключить только один моторчик.
Второй способ – сверху на L293 напаять другую L293. Берем и напаиваем пин 1 к пину 1, пин 2 к пину 2 и так далее. Этот способ так же дает прибавку к силе тока в два раза, но, в отличие от первого – оставляет возможность управлять сразу двумя моторчиками. У вас может возникнуть идея – а не напаять ли мне еще парочку L293? К сожалению, последующая напайка микросхем не приведет к увеличению силы тока еще на 600 мА. Прибавка будет незначительна.
“Э-эх, придется убирать мой 12-Вольтовый мотор… “ Не спешите расстраиваться. Для более мощных моторов подойдет старший брат L293 - L298, но сейчас мы не будем его рассматривать. Это мы сделаем чуть позже.
Motor Shield
Согласитесь, что с таким пучком проводов выглядит это все не очень. Чтобы избавиться от него можно спаять схему с L293 на печатной или макетной плате для пайки, но что делать, если паять не хочется или не умеется? Для этого существуют готовые решения в виде шилдов для Arduino, например. Я расскажу про один из них – Motor Shield V1 от DK Electronics.
Вот, собственно, фото шилд.
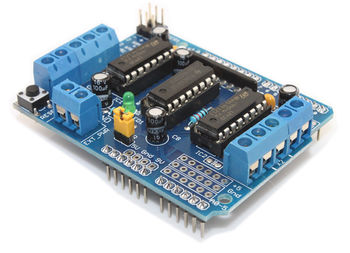
На этом шилде установлены две L293D, что позволяет управлять сразу четырьмя моторами. Еще там есть два контакта для сервомоторов. Питание подается либо на клемник, либо, при установленной перемычке, с питания Arduino. Перемычка так же позволяет брать питание для Arduino с шилда. Для работы с этим шилдом существует специальная библиотека. Скачать ее можно тут.
К минусам платы. Для работы с шилдом используются почти все цифровые пины, кроме 0, 1, 2, 13. Как мы знаем, пины 0 и 1 используются Arduino для прошивки, поэтому их лучше не использовать.
Есть тут и хорошая сторона. Если не подключать сервы, например, освобождаются пины 9 и 10, а если не использовать какой-либо из моторов, то освободятся пины 3, 5, 6, 11, в зависимости от неиспользуемого мотора. И еще. Нам остаются доступны шесть аналоговых выходов, которые при желании можно использовать как цифровые.
Начнем подключение моторов. Ради эксперимента сделаем робота, который ездит вперед, назад, а также вращается вокруг собственной оси. В качестве платформы я взял собственную разработку, описанную выше. Вы можете взять, что душе угодно, главное – подходящее по характеристикам.
Нам понадобятся
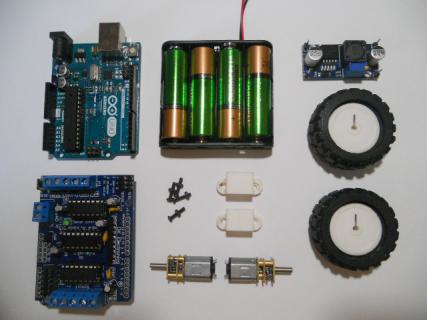
- Arduino UNO – Можно использовать любую другую форм фактора Arduino UNO. Leonardo или Iskra, например.
- Motor Shield – Подойдут и другие версии этого шилда.
- Моторчики на 6В – Можно взять любые, подходящие по характеристикам к Motor Shield.
- Колеса диаметром 42мм – Колеса подходящие к моторчикам и платформе
- Крепления для моторчиков – Моторчики нужно прикрепить к платформе. Возьмите подходящие к вашей.
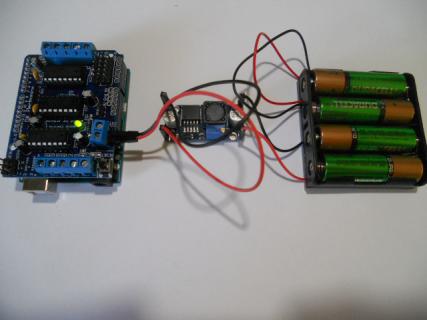
- Питание – Я взял блок аккумуляторов и получил на выходе около 5 Вольт, что недостаточно для питания моторов и Arduino, поэтому я подключил DC/DC преобразователь и поднял напряжение до 9В. Если нет преобразователя, то можно воспользоваться обычной кроной, подключив ее к питанию Arduino.
Пришло время собрать нашего робота.
Шаг 1
Соединяем Arduino и Motor Shield.

Шаг 2
Собираем моторы и прикручиваем их на платформу.
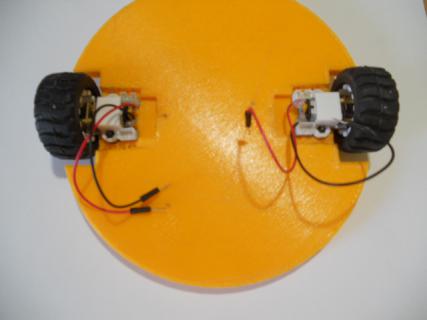
Шаг 3
Собираем питание через повышающий преобразователь.
Для тех, у кого Крона. Не забудьте перемычку!

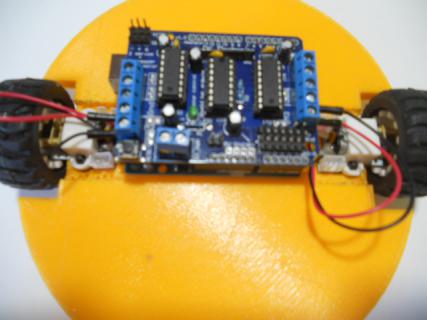
Шаг 4
Прикручиваем моторы к Motor шилду с Arduino.
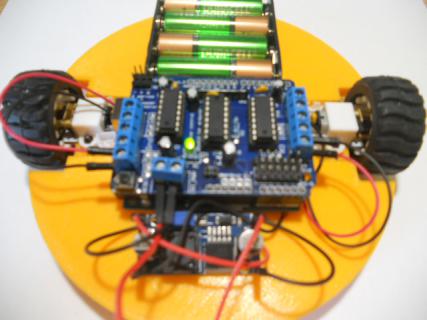
Шаг 5
Добавляем питание.
Шаг 6 (Опционально)
Прикрепим крышку – для эстетики.

У нас есть готовый робот. Теперь пришло время его запрограммировать. Смотрим на код.
//Подключаем библиотеку для работы с Motor Shield
#include <AFMotor.h>
//Определяем левый мотор на клеммник номер 2
AF_DCMotor l_motor(2);
//Определяем правый мотор на клеммник номер 3
AF_DCMotor r_motor(3);
//Переменные для определения скорости
//и времени движения
int spd = 50;
int time(1000);
void setup()
{
//Задаем начальную скорость и выключаем моторы
l_motor.setSpeed(spd);
l_motor.run(RELEASE);
r_motor.setSpeed(100);
r_motor. run(RELEASE);
}
void loop()
{
// Едем вперед
l_motor.run(FORWARD);
r_motor.run(FORWARD);
l_motor.setSpeed(spd);
r_motor.setSpeed(spd);
delay(time);
// Едем назад
l_motor.run(BACKWARD);
r_motor.run(BACKWARD);
l_motor.setSpeed(spd);
r_motor.setSpeed(spd);
delay(time);
// Крутимся против часовой стрелки
l_motor.run(FORWARD);
r_motor.run(BACKWARD);
l_motor.setSpeed(spd);
r_motor.setSpeed(spd);
delay(time);
// Крутимся по часовой стрелке
r_motor.run(FORWARD);
l_motor.run(BACKWARD);
l_motor.setSpeed(spd);
r_motor.setSpeed(spd);
delay(time);
}
Отлично! Время проверять. Вот видео с моей проверки. А у вас как?
“Ты что-то говорил про робототехнические платы?” – могут сказать те, кто читал вводный урок 2 части курcа. Да, такие платы есть. Рассмотрим робототехническую платформу Strela.
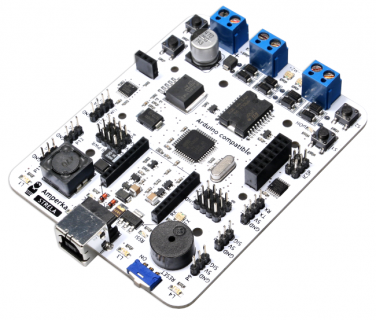
Мечта робототехника. (Почти). Преимущества платы я описывал тут. Сразу к делу.
На ней- то и установлен старший брат L293 – L298. А еще пины выведены тройками, что как раз подходит для подключения многих датчиков.
Эту плату можно подключить вместо Arduino UNO и Motor Shield. Кроме того, ребята из Амперки написали библиотеку для работы со Стрелой, что делает управление моторами достаточно тривиальной задачей.
Для тех, кто не знал, рассказываю. К каждой нормальной библиотеке существуют примеры по ее использованию и библиотека для Стрелы не исключение. Для того чтобы их найти, заходим во вкладку Файл -> Примеры -> Strela. Там выбираем пример StrelaMotors, где выполняется скетч, похожий на скетч с использованием Motor Shield. Кстати, к Motor Shield тоже есть примеры. Если интересно – смотрите.
Что еще можно сделать со Стрелой – смотрите ниже.А мы переходим к беспроводной связи по Bluetooth.
Bluetooth
Робот, который сам ездит по комнате это, конечно, хорошо, но хотелось бы порулить роботом самостоятельно. Для этого нужно организовать связь между Arduino и управляющим устройством.
В качестве управляющего устройства я выбрал смартфон. Связь мы будем организовывать по протоколу Bluetooth, поэтому пришло время знакомиться.

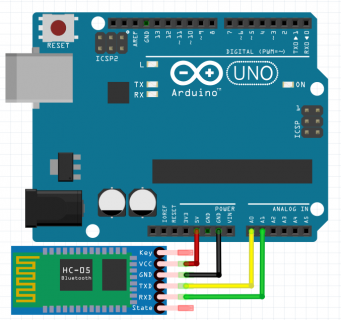
Это модуль HC-06. Я не буду особо вдаваться в подробности, но кому интересно, переходим сюда. Наша цель – порулить роботом со смартфона. Начнем, пожалуй.
Для начала нужно подключить HC-06 к Arduino. Подключение будем осуществлять при помощи Software Serial. Эта библиотека позволяет эмулировать Serial Port на нужных нам пинах. Ради эксперимента попробуем сделать это на пинах A0(RX) и A1(TX). Зачем? Помним, что я рассказывал про Motor Shield.
Подключаем так:
- Vcc – к 5V
- GND – к GND
- RX – к TX
- TX – к RX
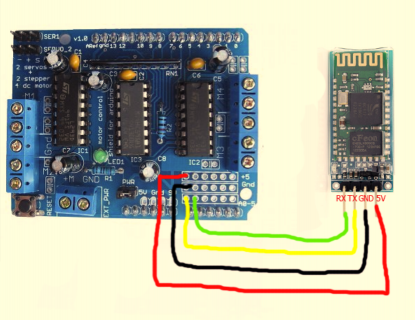
Я подключу HC-06 к роботу, которого мы собирали выше. Для этого воспользуемся тремя полосами на Motor Shield.
Робот готов. Осталось его запрограммировать.
Прежде чем читать код, вы должны кое-что узнать. Моторы не идеальны, как и все в этом мире. Даже два мотора из одной партии, идущие друг за другом, будут немного отличаться, что скажется на разнице в количестве оборотов при одном и том же напряжении. Если моторы просто подключить к motor Shield и подать на них одинаковую скорость, а это и есть одинаковое напряжение, то робот поедет не прямо, а немного, или много, в сторону. Это можно увидеть в видео выше.
Для того чтобы этого избежать, мы будем применять корректировочные коэффициенты. У меня левое колесо крутится намного быстрее, чем правое, поэтому я поставил коэффициент 0.62 для компенсации. Значение коэффициента подбирается экспериментальным путем.
// Подключаем библиотеки для работы с Motor Shield и Software Serial
#include <AFMotor.h>
#include <SoftwareSerial.h>
//Определяем пины для эмуляции
SoftwareSerial mySerial(A0, A1); // RX, TX
//Определяем левый мотор на клеммник номер 2
AF_DCMotor l_motor(2);
//Определяем правый мотор на клеммник номер 3
AF_DCMotor r_motor(3);
//Переменные для определения скорости
//и корректировки вращения
float spd = 70.0;
float corr_l = 0.62;
float corr_r = 1;
float rot = 50.0;
void setup()
{
//Задаем начальную скорость и выключаем моторы
l_motor.setSpeed(spd);
l_motor.run(RELEASE);
r_motor.setSpeed(spd);
r_motor. run(RELEASE);
//Устанавливаем соединение с HC-06
mySerial.begin(9600);
}
void loop()
{
//Если появились данные,
//вызываем функцию управления
if (mySerial.available())
{
drive();
}
}
void drive()
{
//Переменная для пришедших данных
char control = mySerial.read();
//Для начала установим скорость
if (((control - '0') >= 0) && ((control - '0') <= 9))
{
spd = (control - '0') * 25.0; //сохраняем новое значение скорости
}
else if (control == 'q')
{
spd = 255.0;
}
//Сравниваем команды, пришедшие со смартфона
else if (control == 'S') //Если пришла команда "S", стоим
{
l_motor.run(RELEASE);
r_motor. run(RELEASE);
}
else if (control == 'F') //Если пришла команда "F", едем вперед
{
l_motor.setSpeed(spd * corr_l);
r_motor.setSpeed(spd * corr_r);
r_motor.run(FORWARD);
l_motor.run(FORWARD);
}
else if (control == 'B') //Если пришла команда "B", едем назад
{
l_motor.setSpeed(spd * corr_l);
r_motor.setSpeed(spd * corr_r);
r_motor.run(BACKWARD);
l_motor.run(BACKWARD);
}
else if (control == 'I') //Если пришла команда "I", едем вперёд и направо
{
l_motor.setSpeed(spd * corr_l);
r_motor.setSpeed(spd * corr_r + rot);
r_motor.run(FORWARD);
l_motor.run(FORWARD);
}
else if (control == 'J')//Если пришла команда "J", едем назад и направо
{
l_motor.setSpeed(spd * corr_l);
r_motor.setSpeed(spd * corr_r + rot);
r_motor.run(BACKWARD);
l_motor.run(BACKWARD);
}
else if (control == 'G') //Если пришла команда "G", едем вперёд и налево
{
l_motor.setSpeed(spd * corr_l + rot);
r_motor.setSpeed(spd * corr_r);
r_motor.run(FORWARD);
l_motor.run(FORWARD);
}
else if (control == 'H') //Если пришла команда "H", едем назад и налево
{
l_motor.setSpeed(spd * corr_l + rot);
r_motor.setSpeed(spd * corr_r);
r_motor.run(BACKWARD);
l_motor.run(BACKWARD);
}
else if (control == 'R') //Если пришла команда "R", крутимся вправо
{
l_motor.setSpeed(spd * corr_l);
r_motor.setSpeed(spd * corr_r);
r_motor.run(FORWARD);
l_motor.run(BACKWARD);
}
else if (control = 'L') //Если пришла команда "L", крутимся влево
{
l_motor.setSpeed(spd * corr_l);
r_motor.setSpeed(spd * corr_r);
l_motor.run(FORWARD);
r_motor.run(BACKWARD);
}
}
Робота прошили. Теперь займемся смартфоном.
RC controller
Для связи Arduino и смартфона через Bluetooth есть множество различных приложений. В поиске ключевыми словами будут: Arduino, Bluetooth, RC.
Я выбрал приложение под названием Bluetooth RC Controller. Оно идеально подойдет для нашей цели. При нажатии на кнопку приложение отправляет значение типа char на HC-06, который, в свою очередь, передает пришедшее значение Arduino. Значение, отправляемое при нажатии кнопки, устанавливается самостоятельно.

Чтобы установить соединение с роботом, нужно нажать на шестерню и выбрать пункт “Settings” В “Settings” нужно убедиться, что кнопки соответствуют этим отсылаемым символам, либо изменяем код Arduino.
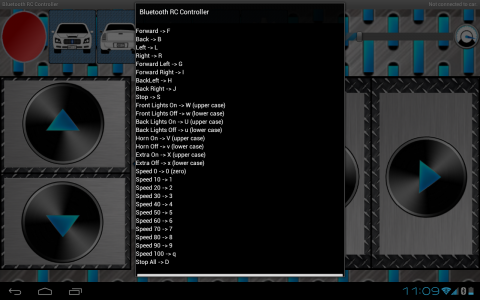
После настройки символов можно устанавливать соединение с HC-06. Жмем на шестерню и заходим в “Connect to car” Открывается окно с сопряженными устройствами. В нем выбираем HC-06. Если его нет, то ищем с помощью “Scan for devices”. Если устройство найдено, но не хочет сопрягаться, то заходим в Bluetooth на смартфоне и сопрягаем, как обычно. Пароль стандартный – 1234. После этого заходим в “Scan for devices” и соединяемся.
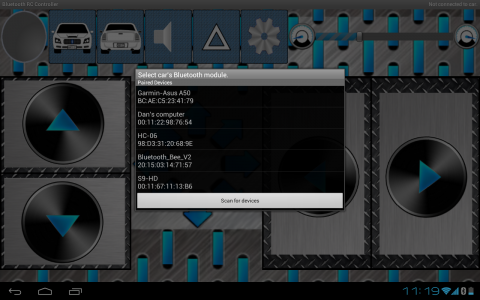
Когда соединение установится, загорится зеленый огонек сверху, а HC-06 перестанет моргать. Можно начинать рулить. Полоска сверху отвечает за скорость движения.
Strela
Вернемся к Стреле. Еще одним преимуществом Стрелы является возможность установить Bluetooth XBee формата, а хорошо это тем, что другие пины остаются свободными. А так как для Стрелы есть готовая библиотека, которая помогает сократить код для управления моторами, то использовать Стрелу для управления роботом по Bluetooth очень даже стоит.
Для этого нужно подключить XBee к Стреле, прошить ее скетчем из примеров под названием “ArduinoBluetoothRCCarOnStrela” и подключиться к XBee через RC controller.
Советы
Робот у меня готов и даже ездит по команде со смартфона. Но не все может пройти гладко. Я расскажу о некоторых проблемах и их решениях, а также дам несколько советов начинающим робототехникам.
Колеса крутятся не в те стороны, в какие хотелось бы – эта проблема легко устраняется путем перестановки проводов в клемниках или программно.
Bluetooth модуль не работает – нужно проверить наличие горящего красного светодиода на модуле. Если он не горит, то проверить правильность подключения Bluetooth модуля. Если светодиод горит, но соединение ну устанавливается, нужно убедиться в том, что RX модуля соединен с TX платы и наоборот, а так же попробовать способ с сопряжением модуля с Arduino через стандартный Bluetooth интерфейс.
Робот не едет прямо – я описывал эту проблему чуть выше, когда рассказывал про Bluetooth и Motor Shield.
При езде робот неожиданно останавливается и теряется соединение с HC-06 – проблема в источнике питания. Мы знаем, что Arduino нужно не менее 7В для стабильной работы, а еще мы знаем, что моторчики очень хорошо кушают. Если поднести щупы мультиметра к клеммникам подачи напряжения и измерить напряжение при выключенных моторах, а потом их включить, то можно увидеть, что напряжение на мультиметре упадет. Причем упасть напряжение может по-разному.
Если подключен источник питания, который не может обеспечить достаточный ток для моторов, то напряжение может упасть сильно, с 9 до 5 Вольт, например, а 5В уже не будет хватать для Arduino и она перезапустится. Решение – подключить более мощное питание. Как рассчитать, я расскажу ниже.
Если подключить источник питания мощнее, то просадка напряжения может быть только в течение нескольких миллисекунд, но и их может оказаться достаточно для перезапуска контроллера. Решение – параллельно проводам питания установить конденсатор не менее чем на 1000мкФ, емкость можно определить экспериментально. Я ставил конденсатор на 3300 мкФ и на 16В. Не забываем смотреть на максимальное напряжение конденсатора.
Когда источник питания достаточно мощный, просадки напряжения не более 0.2В.
Несколько советов для начинающих робототехников
Начиная планировку робота, первым делом желательно позаботиться о расчёте мощности силовой части и подборе соответствующего источника питания. Будет обидно, если 4 батарейки ААА не потянут твои 4 6-вольтовых мотора, а места для более источника питания не останется.
Для расчета мощности ищем характеристики моторов, плат, датчиков. Из курса физики знаем, что мощность можно рассчитать по формуле P = IU, где I – сила тока, U – напряжение. С помощью этой формулы и характеристик легко рассчитать потребляемую мощность готового устройства, а зная потребляемую мощность и рабочее напряжение питания, можно узнать оптимальную силу тока, необходимую для работы устройства, зная силу тока, можно определиться с необходимой емкостью аккумулятора и время работы устройства от выбранного аккумулятора.
Как я и говорил, всегда следует ставить конкретную цель, при достижении которой проект можно считать выполненным. В этой мысли есть нюансы. Если проект достаточно большой, то добраться до цели не так-то просто, особенно, когда пишешь код. Написал я однажды большой код, думал - «Вот сейчас напишу все и проверю! », при попытке скомпилировать код, он не сразу скомпилировался, так как было несколько ошибок. Ошибки я убрал, да вот только код не работал, как я хотел. Пришлось переписывать все почти с нуля, понемногу добавляя код и проверяя на работоспособность получившийся код. Так советую поступить и вам.
Если есть цель сделать “пароль” из трех символов, то не стоит программировать все три сразу. Лучше сделать пароль из одного символа, проверить его, потом из двух, а после проверки – из трех. Мне помогает.
Робот создается методом проб и ошибок. Не получится один раз запрограммировать, чтобы действие выполнялось идеально. Те же подстроечные коэффициенты на колесах, поэтому не стоит опускать руки если что-то не получается, а если совсем-совсем не получается, то можно обратиться к добрым людям на форумы или написать мне, обязательно поможем!
Заключение
Робототехника – классная штука! В скором времени, я думаю, роботы займут, а то и уже заняли место в жизни людей. Мы сделали простейшего робота-машинку с управлением со смартфона, позже займемся более серьезными проектами, ну а пока – до скорого!
Прикрепленные файлы:
- B-Robot.ino (4 Кб)
- L293_Shield.ino (1 Кб)
- L293D.ino (2 Кб)

 Опубликована:
Опубликована:


 Вознаградить
Вознаградить



Комментарии (1) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация